本文探討了數控機床龍門坐標同步的相關內容。
本文簡要介紹了采用SINUMERIK 840D系統及其SIMODRIVE 611D伺服驅動系統的數控機床同步軸的實施方案和調試方法。
Gantry-type CNC machine——with n gantry groups
(xi’an aircraft international co. waiter paley)
Abstract:The actualizing project and adjusting method which gantry groups axes used CNC machine with SINUMERIK 840D
and SIMODRIVE 611D servo drive system are introduced here.
Key-Words:gantry axis; leading axis; synchronized axis; DB(data block); referencing point
一、 前言
由于機床本身結構的需要,保證機床的整體剛性以及長導軌的穩定性,因此對于同一個坐標采用同步電機驅動,是當今機床廠普遍采用的方法。有助于提高伺服系統的剛性,克服單絲杠引起的位置偏差,避免彈性變形,確保機床的高精度。
二、功能簡介
同步軸功能一般用在2個或多個機械連接的機床坐標,該坐標沒有機械偏移;在編程的基礎上,定義一個同步的坐標。
同步移動時,系統檢測位置的當前值,是否在系統設定的誤差范圍之內。當同步附屬軸偏離主動軸位置范圍之外的話,系統會停止所有的坐標移動,有效防止由于不同步對機床機械部分進行的損壞。
同步軸功能的目的是為了嚴格檢測坐標在導軌上的移動精度。
三、 應用
同步軸功能用于大型龍門銑床的龍門同步功能,每一邊都由自己本身的位置測量循環系統。由于機械硬件連接需要,兩個驅動必須絕對同步,已保證機械應力變形。一個同步組由一個主導軸和最多2個從動軸組成。
四、硬件組織和同步定義
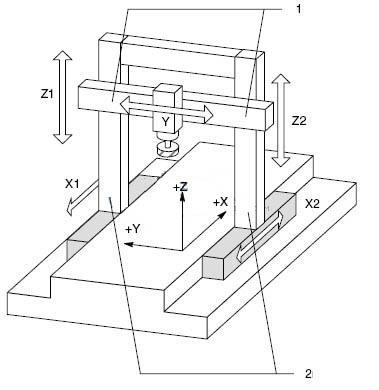
大型數控龍門銑床是由多個坐標單元組成(見下圖)。每個坐標驅動都是單獨的驅動系統,有自己的測量循環,組成一個完整的坐標系統。當機械坐標移動時,如圖兩組坐標X和X1,Z和Z1必須保證完全同步,否則會對機械部件造成損害。
4.1關鍵詞含義:
①同步軸組
同步軸組由至少一對坐標組成,包含一個主動軸和一個從動軸,這些軸都為機械連接。移動時必須同時由NC控制移動。所不同的是兩個坐標位置檢測系統都是單獨的。
②主動軸
主動軸是NC控制的普通的機械坐標,可對其進行零件編程的直線或旋轉軸。軸名是由同步組進行定義的。
③從動軸
從東軸也是由NC進行控制,但它總是隨著主動軸的移動進行移動。軸名也是由同步組進行定義的。
4.2坐標定義
坐標定義是由機床數據GANTRY_AXIS_TYPE來定義的:定義坐標是否屬于同步組內,以及是主動軸還是從動軸。每組同步軸組都是由一個主動軸,和最多2個從動軸組成。
4.3同步軸組的條件
同步軸組不能包含主軸
從動軸不能是定位軸
從動軸不能是另外一個同步軸組的軸名
同步軸組的坐標,每個坐標諸如匹配速度,加速度和動態響應時間等必須一致
4.3同步組實際坐標值誤差監控
同步軸警示限制
主動軸與從動軸超出警示范圍,NC系統輸出報警信息:超出極限范圍。同時PLC輸出信號,使機床停止自動運行。
同步軸行程限制
同步軸組超出行程范圍。
五、同步軸的參考點和同步設定
5.1主動軸的參考點設置方法
坐標的參考點設定由PLC的DB塊進行,要根據坐標驅動類型,進行PLC的指定回參考點編程。啟動該功能。啟動方法為將PLC “Activate referencing” = 1 和“Active machine function REF” = 1) “Traversing key +/–” (DB31, ... ; DBX4.7/4.6)設置為1。
5.2從動軸的參考點設置方法
當主動軸回參考點完成后,從動軸將自動回參考點。從動軸的參考點是由主動軸決定的。不能單獨進行從動軸的回參考電動作。
5.3回參考點后同步軸組將根據NC編程要求自動運行。
六、與同步相關的機床資料
6.1
MD NO. 37100 GANTRY_AXIS_TYPE
該機床數據是用來定義2組同步基本特性:該坐標是否屬于同步組內坐標,是哪一個坐標(主動軸或從動軸)。具體位設置如下圖:
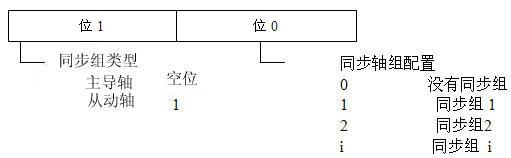
對于840D系統,可以配置最多3個同步組。一個同步組必須要由一個主動軸和最少一個從動軸組成。同組的軸不能再重復使用,如果定義錯誤,控制系統將輸出“INCORRECT GANTRY MACHINE DATA”信息,提示機床同步組配置錯誤。
該配置舉例如下:
0 沒有同步軸
1 同步軸組1中的主動軸
11 同步軸組1中的從動軸
2 同步軸組2中的主動軸
12 同步軸組2中的從動軸
3 同步軸組3中的主動軸
13 同步軸組3中的從動軸
6.2
MD NO. 37110 GANTRY_POS_TOL_WARNING和37120 GANTRY_POS_TOL_ERROR
這兩個數據是為機床同步服務,保證機床坐標的正常同步精度,以完成機床的同步運動,并相關的輸出信息以提示是否超出機床同步的范圍。
定義這些數據后,機床同步就可以試運行。
七、同步軸信號描述
7.1NC控制坐標軸的信號描述
1.開始同步組信號DB 31, ... DBX29.4 ; Start gantry synchronization
使機床同步開始運行,并保證同步誤差在允許范圍之內,否則此信號置0。
2.開始自動同步組信號DB 31, ... DBX29.5 ; Start automatic synchronization
開始自動運行同步組,與上個信號同類。
7.2來自坐標軸的信號描述
1.同步移動誤差極限DB 31, ... DBX101.2 ; Gantry trip limit exceeded
系統發出的是否同步信號。由PLC接受并處理。
2.同步警示極限DB 31, ... DBX101.3; Gantry warning limit exceeded
同上。
3.同步軸同步開始DB 31, ... DBX101.4; Gantry synchronization ready to start
4.同步軸組正在同步DB 31, ... DBX101.5; Gantry grouping is synchronized
具體坐標同步信號如下表:
八、建立一個同步軸組
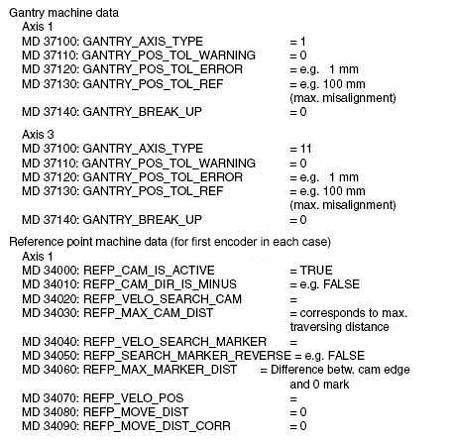
群組定義:坐標1=主動軸 采用增量測量回饋循環
坐標3=從動軸 采用增量測量回饋循環
第一步:修改以下機床數據
第二步:設置NCK PLC接口信號
PLC程序的設置:
axis1 設置:
DB31, ... ; DBX 29.4 = 0
DB31, ... ; DBX 29.5 = 1
Axis3置:
DB31, ... ; DBX 29.4 = 0
機床準備好信號設置:
DB31, ... ; DBB101
第三步:設定MD 37110: GANTRY_POS_TOL_WARNING和
37120: GANTRY_POS_TOL_ERROR 為坐標的最大值
參考點設置MD 37130: GANTRY_POS_TOL_REF
此坐標數據的大小及關聯如下:
第四步:設置完成,調整機床參數匹配。
九、結束語
機床坐標同步是實際應用中實用的基礎技術,要根據所采用的機床剛性和結構,采用不同的配置,才能達到所要達到的機床精度要求。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF