本文探討研究了電動多軸螺母擰緊機的控制系統研發相關內容。
介紹一種電動多軸螺母擰緊機控制系統的基本原理及硬件和軟件原理。該系統采用分布式結構,每個軸都由一個以89C51為核心的控制單元控制,保證了定扭矩擰緊實現。獨特的高速總線使上位單元與控制單元快速交換信息,保證了各軸間協調工作,以完成特定的擰緊工藝。
1 引言
目前,國內許多廠家生產的電動多軸螺母擰緊機,其擰緊精度往往達不到生產要求,或性能不穩定。其主要原因是,多數采用工業控制計算機加各種板卡組成控制核心,或采用可編程序控制器(PLC)控制,但由于這兩種方法微機或PLC響應速度慢,勢必影響擰緊精度。該系統采用分布式結構,自行開發以89C51為核心的上位協調單元及單軸控制單元,在擰緊過程中每個單元獨立工作,以保證快速響應。上位單元根據工藝要求協調軸間擰緊步驟,同時采用串行通信與管理計算機交換信息,既保證了擰緊精度,又具有計算機監控及數據管理功能。
2 系統構成及工作原理
電動多軸螺母擰緊機控制系統的構成如圖1所示(以十軸系統為例)。
圖1 擰緊機控制系統構成圖
管理計算機設置擰緊的工藝參數(如擰緊的轉角起始扭矩、轉角值、扭矩值及要求的誤差范圍等)及系統內部參數(如系統每個擰緊過程使用的速度、各種保護參數、數據傳輸的間隔等);班組的作業管理,接收協調單元傳送的各軸擰緊過程及擰緊結果并存入數據庫中,具有擰緊結果的查找及打印功能;接收協調單元傳送的指定軸擰緊過程曲線并實時顯示,有價值的曲線可根據要求存入硬盤,可隨時調出顯示或打印,曲線反映的扭矩上升下降過程及屈服點的情況,可用于分析被擰緊件的材料和加工情況;管理計算機還配備了質量分析軟件,根據存儲的擰緊結果計算出某年、月、日或班的擰緊質量分布圖直方圖,根據存儲的擰緊結果及工藝要求和設定的采樣分組值,采用正態分布算法計算出擰緊質量趨勢圖及UCL、LCL、Cp、Cpk等分析值,曲線可顯示及打印,用于指導生產,避免殘次品的出現。
協調單元帶有非易失RAM存儲系統的工藝參數和內部參數,其本身帶有LED燈及數碼管和小鍵盤,用于顯示和修改這些參數。系統上電或參數變化時,將參數通過總線寫入每個控制單元中;協調單元具有數字輸入,用于接收自動擰緊信號和多軸擰緊信號輸入,在條件滿足的情況下,通過總線向控制單元發出擰緊指令;協調單元循環掃描各控制單元的狀態,當各單元狀態發生變化時,通過串行口向管理計算機傳送此軸的狀態,自動擰緊過程結束時,顯示本次擰緊是否成功及本班作業統計數;自動擰緊過程中監視各軸的狀態,全部達到轉角扭矩時發出同步轉角擰緊指令;根據參數設定,在自動擰緊過程中定時讀取指定軸的擰緊動態扭矩和角度值,通過串行口傳送給管理計算機。
控制單元內設一片8155,用于存儲參數和動態值,協調單元可通過總線進行讀寫8155的RAM;當擰緊狀態發生變化時,協調單元將當前的狀態、扭矩及角度寫入RAM中,使協調單元及時讀到;控制單元帶有LED燈及數碼管,兩排數碼分別顯示當前扭矩和角度,擰緊結束時顯示本次擰緊結果,LED燈用于顯示電源、正轉、反轉及擰緊結果的扭矩高、成功、扭矩低;控制單元的數字輸入用于接收單軸的正反轉擰緊信號,模擬量輸入用于接收單軸的檢測單元處理的扭矩輸入,光耦輸入可接收伺服單元分頻處理的角度脈沖信號用于計算轉角,數字輸出及模擬量輸出用于輸出信號給伺服單元來控制伺服電機,以完成擰緊過程。
3 系統主要技術特點
3.1 自定義總線的實現
本系統分布式結構的核心是系統總線。由于協調單元與控制單元之間的通信特點是控制單元獨立完成擰緊分步過程,協調單元控制擰緊步驟并將控制單元的數據傳送到管理計算機。考慮到這一特點及單片機89C51資源情況,設計了以共享8155的256字節RAM為中心的總線結構。圖2為協調單元電路原理圖的總線接口部分。當協調單元需要讀寫某一控制單元時,首先根據GAL16V8的74LS273尋址將軸號(0-31)和總線使能信號ZBE寫入74LS273鎖存,然后檢查控制單元的返回信號ANS是否為有效(低電平),有效后即可根據GAL16V8的總線RAM的尋址讀寫此控制單元8155的內容。讀寫操作與一般的RAM相同,圖中U3和U5的74LS245芯片用于總線驅動。
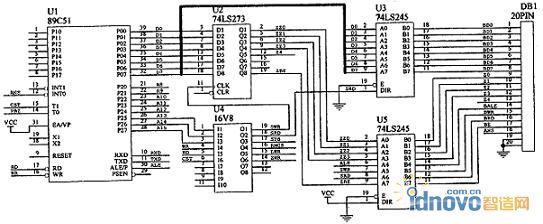
圖2 協調單元總線接口圖
圖3為控制單元電路原理圖的總線接口部分。由于8155的RAM是共享資源,因此,必須保證協調單元和控制單元不同時讀寫。由于協調單元對8155的RAM的讀寫內容較少,采用申請時間在前優先的原則,搶占不成功則等待對方操作結束。控制單元設有撥碼開關DIP1,用于設置控制單元軸號。當總線的使能BE有效且Z0-Z4的軸號與撥碼開關設置一致時,74HC521輸出ZHCS有效,89C51根據ZHCS信號檢測到協調單元占用8155,同時GAL16V8組合出信號封鎖U2,使U5和U6總線操作有效。控制單元對8155讀寫時,首先檢測ZHCS是否有效,有效則等待其結束,如無效則立即發出RMZY封鎖ANS的輸出。為了避免同時檢測沖突,控制單元應等待4個周期,看ZHCS是否出現,如出現應取消RMZY信號。等待協調單元讀寫結束再繼續續寫。協調單元讀寫8155時,確認ANS有效后也應等待4個周期,以保證讀寫的可靠。
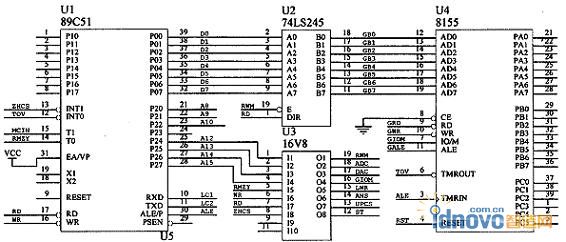
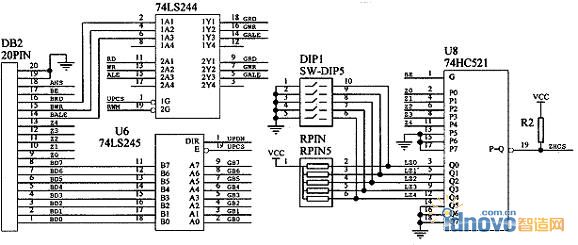
圖3 控制單元總線接口圖
3.2 通信隊列的實現
在多軸擰緊過程中,由于協調單元需要向管理計算機傳送每個軸的擰緊狀態,同時還要傳送曲線數據,因此必須開辟一個通信緩沖區。本系統構造了一個通信隊列形式,使得通信操作高效可靠地進行。首先定義通信格式,本系統通信為三字節方式,第一字節為標識碼(D0-FF),第二字節、第三字節為數據,如E0-EA為一號軸至十號軸的曲線數據,第一字節為扭矩值,第二字節為角度值。在RAM中,開辟256字節作為通信緩沖區,同時定義存放指針和傳送指針。當兩個指針相等時,說明沒有數據需要傳送;當有數據需傳送時,CPU將數據按當前存放指針順序放入隊列緩沖區并修改存放指針;當串行口發送寄存器空時,CPU檢查傳送指針與存放指針,如不相等則從傳送指針位置取出一個字節發送,同時修改傳送指針。這里256字節循環使用,使用一個8位寄存器作為指針,使用資源少且運行效率高。
4 結束語
該系統結構已應用于為一汽集團、江鈴集團等企業的擰緊系統中。系統運行可靠,系統的分布式結構保證了控制單元對擰緊過程的快速響應,保證了擰緊精度,系統中完善的分析和管理軟件為企業的生產管理提供了有力的手段。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF