數(shù)控機(jī)床的伺服系統(tǒng)最重要的功能是保證輸出的速度和距離準(zhǔn)確復(fù)制輸入要求。為了保證實(shí)現(xiàn)這個功能,數(shù)控機(jī)床的伺服系統(tǒng)基本包括電流控制環(huán),速度控制環(huán)和位置控制環(huán)三環(huán)控制的系統(tǒng)。電流環(huán)保證伺服系統(tǒng)的電流在動態(tài)時為最佳波形; 速度環(huán)和位置環(huán)保證伺服系統(tǒng)在任何時刻的輸出速度和位置準(zhǔn)確復(fù)制輸入信號要求的速度和位置。評估伺服系統(tǒng)往往從系統(tǒng)的靜特性、動特性出發(fā),本文從下面幾個具體指標(biāo)對伺服系統(tǒng)的性能進(jìn)行評估。
對輸出特性的要求
它是指被控制的伺服電機(jī)和驅(qū)動器的靜特性,根據(jù)這個特性,判斷在要求的速度范圍內(nèi)是否具有足夠的輸出轉(zhuǎn)矩以帶動負(fù)載。是否有足夠的過載倍數(shù)使機(jī)械負(fù)載啟動。電機(jī)的特性如圖1所示。一般伺服電機(jī)以轉(zhuǎn)矩作為主要參數(shù)。連續(xù)工作的轉(zhuǎn)矩不得超過連續(xù)工作區(qū)。在起制動及加減速時不得超過斷續(xù)工作區(qū)。為了能反向和在制動下工作,伺服系統(tǒng)還需要具有四象限工作的特性。
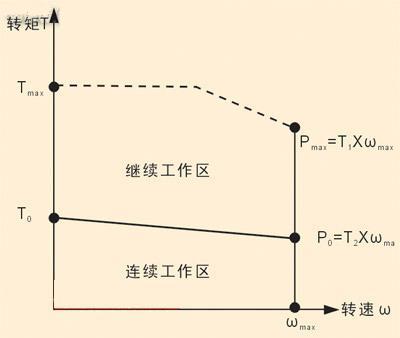
圖1 第I象限的轉(zhuǎn)矩特性
系統(tǒng)動態(tài)特性的分析
系統(tǒng)的動態(tài)特性是描述系統(tǒng)在輸入的作用下,輸出隨時間變化的情況。
速度和電流控制系統(tǒng),有數(shù)字和模擬兩種控制方法,可分別采用離散和連續(xù)的數(shù)學(xué)方法分析。工程上為了簡化分析,根據(jù)香農(nóng)定理,選擇數(shù)字系統(tǒng)的采樣頻率f0,數(shù)字系統(tǒng)信號頻譜中的最高頻率為fmax。這樣系統(tǒng)就可以按連續(xù)系統(tǒng),用拉普拉斯傳遞函數(shù)的方法分析。
f0 ≥ fmax (1)
采樣周期T0為采樣頻率的倒數(shù)。
即T0<1/f0,那么如何確定數(shù)字系統(tǒng)信號頻譜中的最高頻率呢?以電流環(huán)為例,當(dāng)忽略反電勢作用時,電流環(huán)由電流調(diào)節(jié)器、功率PWM 放大器、電機(jī)繞組電流產(chǎn)生電路、電流反饋組成; 繞組的電磁時間常數(shù)一般為幾十到幾百微秒的數(shù)量級,相應(yīng)采樣周期數(shù)量級和一般使用的功率模塊如表1所示。
表1 采樣周期和功率模塊的關(guān)系
速度環(huán)經(jīng)常采用的兩種控制方式
為了分析速度系統(tǒng),把電流環(huán)近似為1; 由于伺服電機(jī)的軸端施加負(fù)載,所以伺服系統(tǒng)的動態(tài)特性受阻尼和慣性負(fù)載的影響。為了提高系統(tǒng)的動態(tài)性能,PID算法是工程上經(jīng)常采用的方法,速度環(huán)經(jīng)常采用的有PI和IP兩種控制方式。本質(zhì)上,PI與IP都是比例—積分的關(guān)系。但PI控制軟件處理的順序是先比例、后積分,著重于比例; 而IP控制軟件處理的順序是先積分、后比例,著重于積分。
lPI控制: 圖2為比例積分控制,其中K2為比例增益,K1為積分增益,KT為電機(jī)轉(zhuǎn)矩系數(shù),J為伺服電機(jī)軸上的慣量。 結(jié)構(gòu)上PI更強(qiáng)調(diào)比例的關(guān)系。因而, 系統(tǒng)在收到速度指令后,比較短的時間就加大了的轉(zhuǎn)矩,PI控制適合于系統(tǒng)機(jī)械剛性低,間隙較大,響應(yīng)性能不太好,要求系統(tǒng)快速跟上的大型機(jī)械,這時可以增加K2,減小K1。如果剛性高的機(jī)械需要改進(jìn)起動特性,也可以實(shí)施PI控制。#p#分頁標(biāo)題#e#
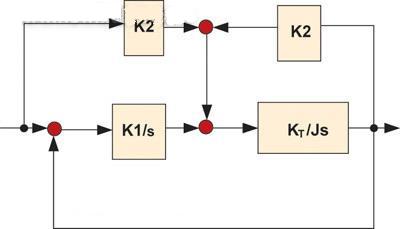
圖2 PI控制
lIP控制: 圖3為積分比例控制,其中K1為積分增益,K2為比例增益。KT為電機(jī)轉(zhuǎn)矩系數(shù)。結(jié)構(gòu)上IP強(qiáng)調(diào)積分的關(guān)系。因而,機(jī)械開始起動會有一定的延遲,系統(tǒng)比較穩(wěn)定起動。因此,IP控制主要用在對起動要求穩(wěn)定的系統(tǒng),比如,某機(jī)械為剛性高,響應(yīng)快的小型機(jī)械,為增加對擾動的阻尼并且使起動穩(wěn)定,可以采用IP控制,同時適當(dāng)加大速度環(huán)增益K1。
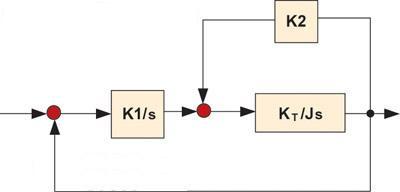
圖3 IP控制
從以上的分析及相關(guān)的頻率特性計(jì)算可以得到: PI具有較大的高頻增益,因而提高了響應(yīng)性。相頻特性: PI在頻域范圍內(nèi)降接近90°; 而IP下降接近180°因而PI控制更穩(wěn)定; PI與IP兩者抗擾動特性基本相同。
速度環(huán)采樣時間: 選電流環(huán)采樣時間的2-3倍就可以了。目前,伺服系統(tǒng)的采樣周期大約如表2:
表2 伺服系統(tǒng)三環(huán)的采樣周期
在分析了速度環(huán)后,再看一看電流環(huán),一般也采取PI或IP的結(jié)構(gòu),分析的方法也一樣。
除了PI和IP的結(jié)構(gòu)外,有時也采用參考模型PI調(diào)節(jié)器的方法進(jìn)行補(bǔ)償。
負(fù)載慣量
對伺服系統(tǒng)動特性的影響
伺服電機(jī)軸上的慣量包括電機(jī)和負(fù)載的慣量兩部分。以上對速度環(huán)的分析是不考慮負(fù)載慣量的情況。負(fù)載慣量直接影響使速度環(huán)的幅頻特性和相頻特性變壞。一般說,慣量越大,動特性越不好。 從圖2~圖3看出,負(fù)載慣量對伺服系統(tǒng)的動特性有影響。一般選負(fù)載慣量不大于電機(jī)慣量的3~5倍。
位置控制的動態(tài)特性
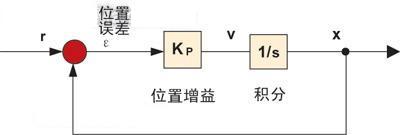
圖4 伺服系統(tǒng)位置控制環(huán)簡化圖
經(jīng)過上面分析,在速度增益較大時,速度環(huán)近似為1; 于是位置控制如圖4所示。可以把它的開環(huán)視為一個積分環(huán)節(jié)。 其閉環(huán)為一階慣性環(huán)節(jié),時間常數(shù)為圖5中位置增益Kp的倒數(shù)。Kp的大小與機(jī)械的負(fù)載特性有很大的關(guān)系。Kp越大,響應(yīng)越快。一般大型機(jī)床Kp=20~40/s,中、小型機(jī)床Kp=30-60/s,隨著控制系統(tǒng)性能的不斷改進(jìn),在高速和高精系統(tǒng)中,通過改善電流環(huán)特性,提高速度環(huán)增益,消除機(jī)械的共振點(diǎn)等措施,Kp可以大于100/s。
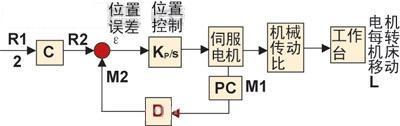
圖5 進(jìn)給伺服系統(tǒng)簡化圖
系統(tǒng)最高速度與位置分辨率的關(guān)系
數(shù)控機(jī)床的伺服系統(tǒng)是一個數(shù)字位置控制的系統(tǒng),在最大輸出速度不變的情況下,其位置分辨率越高,對系統(tǒng)要求越高。為了分析方便,設(shè)系統(tǒng)電流環(huán)和速度環(huán)的增益足夠大,于是,可把伺服系統(tǒng)圖簡化為圖5;圖4中的Kp為伺服系統(tǒng)圖簡化后的位置增益,它的意義是當(dāng)位置系統(tǒng)有1個檢測單位誤差時,系統(tǒng)的速度V多大。
即Kp=V/ε(2)
#p#分頁標(biāo)題#e#
在式(2)中,當(dāng)位置增益不變,系統(tǒng)的誤差最大時,它的輸出速度也為最大Vmax,如果位置控制器具有N位二進(jìn)制的誤差寄存器,那么最大誤差為2N-1,為了達(dá)到最大Vmax,式(3)必需得到滿足。
Kp(2N-1)≥Vmax (3)
Vmax愈大,在Kp不變的情況,N的位數(shù)愈大; 系統(tǒng)也就愈復(fù)雜。設(shè)2N>>1,那么:
N ≥ lg(Vmax/Kp)/lg2 (4)
例如,某機(jī)床設(shè)計(jì)要求分辨率為1nm,最大速度為1m/min=109nm/min、相當(dāng)16.7×106pps,位置增益為100/s,根據(jù)式(4),需18位以上的誤差寄存器才能滿足指標(biāo)要求。如果位置增益為25/s,需20位以上的誤差寄存器才能滿足指標(biāo)要求。增益越低,所需位數(shù)越大。
電子齒輪比
考慮到輸入與輸出單位的不同,把數(shù)控機(jī)床的進(jìn)給伺服系統(tǒng)簡化成圖5,其中C,D分別為指令單位與檢測單位的倍增比。R2為最小移動單位,M2為檢測單位,R1為最小輸入增量,或指令單位;M1為伺服電機(jī)每轉(zhuǎn)時編碼器PC的脈沖數(shù); 設(shè)伺服電機(jī)每轉(zhuǎn)相當(dāng)機(jī)床移動為L,通過C,D的系數(shù)變換,可以得出:
R1/C=R2(5)
L/M1×D=M2(6)
由于 R2=M2, 所以 C/D=R1×M1/L (7)
C/D稱為電子齒輪比; 改變C,D可以使伺服系統(tǒng)在同樣最小輸入增量的輸入時可得到不同大小的檢測單位的輸出。例如,最小輸入增量為1μm,檢測單位為0.1μm,C=10,L=5mm, M1=10000p/r,那么D=5。
伺服系統(tǒng)的改進(jìn)措施
模擬伺服系統(tǒng)需要增加很多額外的硬件才能提高性能。但對數(shù)字伺服系統(tǒng)可以很容易通過軟件算法和通信接口的資源增加功能和提高性能。比如:
前饋控制
采用前饋控制是一種有效減少穩(wěn)態(tài)跟隨誤差的方法。它本質(zhì)是一種補(bǔ)償控制。利用數(shù)字伺服的位置前饋控制算法,可以減少位置環(huán)控制的滯后。增加了前饋后,跟隨誤差從式(2)變?yōu)槭?8)。
e=V/[ KP/(1-a)] (8)
其中a為前饋系數(shù); 為了減小高速時的振動,還可以增加速度前饋控制。
內(nèi)環(huán)結(jié)構(gòu)的改進(jìn)
l電流環(huán)增加“1/2 PI”控制:當(dāng)負(fù)載小電流時,電流環(huán)具有PI控制的特性;當(dāng)負(fù)載大電流時,它卻具有IP控制的特性,這樣,可以壓縮由于大電流引起的電流超調(diào),以滿足高速高精加工控制的需要;
l雙位置環(huán)控制: 在具有大間隙的機(jī)械上加工,當(dāng)在半閉環(huán)工作時是穩(wěn)定的,但構(gòu)成閉環(huán)時就有可能振動。為此,采取雙位置控制的方法; 當(dāng)過渡過程時, 系統(tǒng)處于半閉環(huán)下工作, 當(dāng)定位時, 系統(tǒng)處于全閉環(huán)下工作;
l振動阻尼控制: 位置閉環(huán)系統(tǒng)有時應(yīng)用電機(jī)軸上的編碼器作為速度反饋,而利用分離式編碼器作為位置反饋;當(dāng)加減速時,電機(jī)與機(jī)械間的連結(jié)可能變得不好,使得機(jī)械的速度與電機(jī)的速度稍為不同,這就很難控制機(jī)械。為此,設(shè)立了振動阻尼控制環(huán)節(jié),它把電機(jī)與機(jī)械之間的速度差反饋到轉(zhuǎn)矩指令以降低機(jī)械的振動;
l觀測器功能: 比如,利用軟件估算控制狀態(tài),建立狀態(tài)觀測器。它可以用來估算電機(jī)電流、速度以識別非期望電流和控制消除機(jī)械的振蕩。
數(shù)字濾波器
在數(shù)字伺服系統(tǒng),經(jīng)常采用數(shù)字濾波器以去除機(jī)械的共振。這種濾波器有以下幾類: 低通濾波器,各種帶阻濾波器。
非線性補(bǔ)償
如螺距補(bǔ)償,反向補(bǔ)償?shù)取?
結(jié)束語
由于現(xiàn)代數(shù)控系統(tǒng)采用交流數(shù)字伺服技術(shù),因此可以通過軟件算法提高伺服系統(tǒng)的性能和增加功能。但是對于伺服系統(tǒng)的基本性能是設(shè)計(jì)數(shù)控系統(tǒng)首先應(yīng)該掌握的。它包括靜特性、動特性、快速與分辨率的關(guān)系和電子齒輪比等。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF