1 引言
步進(jìn)電動機(jī)是一種將離散的電脈沖信號轉(zhuǎn)化為相應(yīng)角位移或線位移的電磁機(jī)械裝置,它輸出的角位移與輸入的脈沖數(shù)成正比,是一種輸入與輸出脈沖對應(yīng)的增量驅(qū)動元件。它具有轉(zhuǎn)矩大、慣性小、響應(yīng)頻率高等優(yōu)點,已經(jīng)在工業(yè)上得到廣泛的應(yīng)用。但其步矩角較大,一般為1.5"3°,往往滿足不了某些高精度定位、精密加工等方面的要求。
實現(xiàn)細(xì)分驅(qū)動是減小步矩角、提高步進(jìn)分辨率、增加電動機(jī)運行平穩(wěn)的一種行之有效的方法。目前步進(jìn)電動機(jī)細(xì)分驅(qū)動控制,多采用量化的梯形波、正弦波作為細(xì)分驅(qū)動的電流波形,但實際上這些電流波形一般在步進(jìn)電動機(jī)上均不能得到滿意的細(xì)分精度。
在合理選擇電流波形的基礎(chǔ)上,提出用AT89C52單片機(jī)控制實現(xiàn)的步進(jìn)電動機(jī)斬波恒流細(xì)分驅(qū)動方案,其運行功率小,可靠性高,通用性好,細(xì)分精度高,具有很強(qiáng)的實用性。
2 細(xì)分電流波形的選擇及量化
步進(jìn)電動機(jī)的細(xì)分控制,從本質(zhì)上講是通過對步進(jìn)電機(jī)的勵磁繞組中的電流控制,使步進(jìn)電動機(jī)內(nèi)部的合成磁場為均勻的圓形旋轉(zhuǎn)磁場,從而實現(xiàn)步進(jìn)電動機(jī)步矩角的細(xì)分。一般情況下,合成磁場矢量的幅值決定了步進(jìn)電動機(jī)旋轉(zhuǎn)力矩的大小,相鄰兩個合成磁場矢量之間的夾角大小決定了步矩角的大小。因此,想要實現(xiàn)對步進(jìn)電機(jī)的恒力矩均勻細(xì)分控制,必須合理控制步進(jìn)電機(jī)繞組中的電流,使電動機(jī)內(nèi)部合成磁場的幅值恒定,而且每個進(jìn)給脈沖所引起的合成磁場的角度變化也要均勻。我們知道在空間彼此相差2π/m的m 相繞組,分別通以相位上差2π/m而幅值相同的正弦電流,則合成的電流矢量便在空間做旋轉(zhuǎn)運動,且幅值保持不便。這一點對于反映式步進(jìn)電動機(jī)來說比較困難,因為反應(yīng)式步進(jìn)電動機(jī)來說比較困難,因為反映式步進(jìn)電動機(jī)的旋轉(zhuǎn)磁場只與繞組電流的絕對值有關(guān),而與電流的正反流向無關(guān)。以比較經(jīng)濟(jì)合理的方式對步進(jìn)電機(jī)實現(xiàn)步矩角的任意細(xì)分,繞組電流波形宣采用如圖1所示的形式
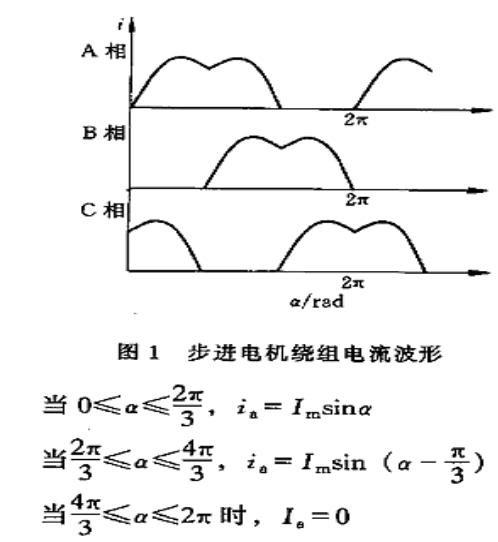
其中,α為電動機(jī)轉(zhuǎn)子偏離參考點的角度。 ib滯后于ia 2π/3, ic超前于ia 2π/3。此時,合成電流矢量在所有區(qū)間, 從而保證合成磁場幅值的恒定,實現(xiàn)電動機(jī)的恒轉(zhuǎn)矩,而步進(jìn)電動機(jī)在這種情況下也最平穩(wěn)。將繞組電流根據(jù)細(xì)分倍數(shù)均勻量化后,所得細(xì)分步矩角也是均勻的。為了進(jìn)一步得到更加均勻的細(xì)分步矩角,可以通過實驗測取一組在通入量化電流波形時,步進(jìn)電動機(jī)細(xì)分步矩的數(shù)據(jù),然后對其誤差進(jìn)行插值補(bǔ)償,求得實際的補(bǔ)償電流曲線,這些工作大部分可以由計算機(jī)來完成。在取得矯正后的量化電流波形之后,以相應(yīng)的數(shù)字量儲存于E?PROM 中的不同區(qū)域,量化的程度決定了細(xì)分驅(qū)動的分辨率。
從而保證合成磁場幅值的恒定,實現(xiàn)電動機(jī)的恒轉(zhuǎn)矩,而步進(jìn)電動機(jī)在這種情況下也最平穩(wěn)。將繞組電流根據(jù)細(xì)分倍數(shù)均勻量化后,所得細(xì)分步矩角也是均勻的。為了進(jìn)一步得到更加均勻的細(xì)分步矩角,可以通過實驗測取一組在通入量化電流波形時,步進(jìn)電動機(jī)細(xì)分步矩的數(shù)據(jù),然后對其誤差進(jìn)行插值補(bǔ)償,求得實際的補(bǔ)償電流曲線,這些工作大部分可以由計算機(jī)來完成。在取得矯正后的量化電流波形之后,以相應(yīng)的數(shù)字量儲存于E?PROM 中的不同區(qū)域,量化的程度決定了細(xì)分驅(qū)動的分辨率。
3 細(xì)分驅(qū)動方案及硬件實現(xiàn)
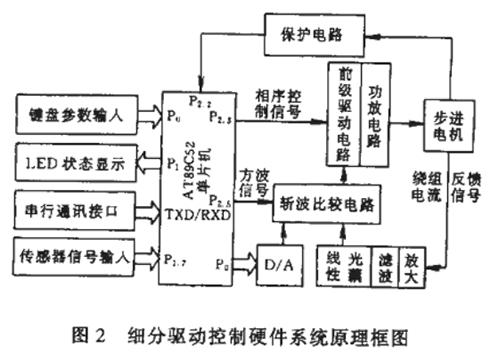
斬波恒流細(xì)分驅(qū)動的方案的原理為:由單片機(jī)輸出 E?PROM 中儲存的細(xì)分電流控制信號,經(jīng)D/A轉(zhuǎn)換為模擬電壓信號,再取樣信號進(jìn)行比較,形成斬波控制信號,控制各功率管前級驅(qū)動電路的導(dǎo)通和關(guān)斷,實現(xiàn)繞組中電流的閉環(huán)控制,從而實現(xiàn)步矩的精確細(xì)分。系統(tǒng)原理框圖如圖2所示。
3.1 控制電路
控制電路主要由AT89CT52單片機(jī)、驅(qū)動電路、D/A轉(zhuǎn)換、E?PROM及可編程鍵盤/顯示控制器Intel8279等組成,單片機(jī)是控制系統(tǒng)的核心。受控步進(jìn)電動機(jī)的細(xì)分倍數(shù)、運行脈沖、正反轉(zhuǎn)、運行速度、單次運行線位移、啟/停等的控制即可由鍵盤輸入,也可通過與上位機(jī)的串行通信接口由上位機(jī)設(shè)置。狀態(tài)顯示提供當(dāng)前通電電動機(jī)、機(jī)電流大小、電動機(jī)運行時間、正反轉(zhuǎn)、當(dāng)前運行速度、線位移及相關(guān)計數(shù)等的顯示,并將工作狀態(tài)和數(shù)據(jù)傳送給上位機(jī)。
傳感器(霍爾傳感器)由于檢測計數(shù)器的當(dāng)前值。單片機(jī)的主要功能是輸出E?PROM中儲存的細(xì)分電流控制信號進(jìn)行D/A轉(zhuǎn)換。根據(jù)轉(zhuǎn)換精度的要求,D/A轉(zhuǎn)換器即可以選擇8位的,也可以選擇12位的。本驅(qū)動的控制器選用的是8位的D/A轉(zhuǎn)換器MAX516。MAX516把4個D/A轉(zhuǎn)換器與4個比較器組合在單個的CMOS IC(DIP20封裝)上4個D/A轉(zhuǎn)換器共享一個參考輸入電壓UREF均可采用下式表示#p#分頁標(biāo)題#e#
UDACi=UREFN/256
式中 N=0,1,…,255
N對應(yīng)于8位的DAC輸入碼D0~D7(此處為細(xì)分電流控制信號)。通過、調(diào)節(jié)UREF的變化范圍,便可調(diào)節(jié)步進(jìn)電動機(jī)繞組中電流的幅值。
3.2 功率驅(qū)動電路
工作中,步進(jìn)電機(jī)組分電流控制信號的D/A轉(zhuǎn)換值Ui輸入到MAX516內(nèi)部各比較器COMPi的同向輸入端。繞組電流取樣信號Ui輸入到COMPi的反向輸入端。斬波恒流驅(qū)動采用固定頻率的方波與比較器輸出信號調(diào)制成斬波控制信號,控制繞組的通電時間,使反饋電壓Ui始終跟隨D/A轉(zhuǎn)換輸出的控制電壓Ui。合理選擇續(xù)流回路就可使繞組中的電流值在一定的平均值上下波動,且波動范圍不大。
調(diào)制用方波信號頻率為21.7KHz,由AT89C52的P2.5/PWM端產(chǎn)生,且各相是同頻斬波,不會產(chǎn)生差拍現(xiàn)象,所以消除了電磁噪聲。為防止因比較器漂移或干擾導(dǎo)致的功率開關(guān)誤導(dǎo)通,把斬波控制信號與像序控制信號相“與”后去控制功放管。當(dāng)開關(guān)截止時,并聯(lián)RC、恢復(fù)復(fù)續(xù)流二級管VD、繞組L及主電源構(gòu)成泄放回路。與單純電阻釋能電阻相比,RC釋能電路使功耗和電流紋波增加較小,而電流下降速度大大加快。電流取樣信號由精密電流傳感放大器MAX471完成。當(dāng)繞組電流流過其內(nèi)部35mΩj精密取樣電阻時,經(jīng)內(nèi)部電路變化,轉(zhuǎn)換為輸出電壓信號
VOUT=ROUT×(ILAOD×500μA/A)
其中ROUT為MAX471外部調(diào)壓電阻,阻值按設(shè)計要求選定;ILAOD為流過精密電阻的相繞組電流。MAX471同時具有電流檢測與放大功能,從而大大方便了整個電路的設(shè)計與調(diào)試。
功率開關(guān)管(功放管)是功放電路中的關(guān)鍵元件,影響著整個系統(tǒng)的功耗和體積。由于所設(shè)計的驅(qū)動器主要用來驅(qū)動額定電流3A、額定電壓27V以下的步近電動機(jī),故選用高額VMOS功率場效應(yīng)晶體管IRF594(UDS=100V,RDS(ON)=0.052Ω,ID=27A)作為開關(guān)管。IRF504導(dǎo)通電阻很小,因此,即使電動機(jī)長時間運轉(zhuǎn),該VMOS管殼本身的溫度也比較低,無須外加風(fēng)扇。為了提高步進(jìn)電動機(jī)的工作可靠性,消除電動機(jī)電感性繞組的串?dāng)_,本系統(tǒng)無論從驅(qū)動部分還是反饋部分都進(jìn)行了隔離。驅(qū)動隔離采用了高速光電耦合器6N137為隔離元件,一方面可以實現(xiàn)前級控制電路同步進(jìn)電動機(jī)繞組的隔離:另一方面使功率開關(guān)管的驅(qū)動變的方便可靠。反饋通道的濾波部分采用無源低通濾波器,其作用是高速衰減繞組(電感線圈)在開關(guān)時截止頻率以上的瞬時高頻電壓信號,從而避免控制電路做出太迅速的反應(yīng)可以有效的的防止步進(jìn)電動機(jī)的振蕩。線性光偶合電路的作用是將濾波后的采樣電阻反饋信號線性的傳輸給比較器。
4 軟件設(shè)計
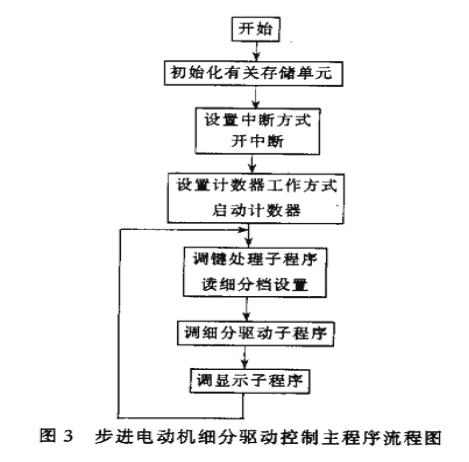
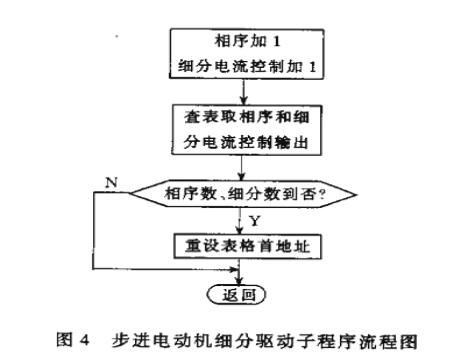
步進(jìn)電動機(jī)細(xì)分驅(qū)動控制的軟件主要由主控程序、細(xì)分驅(qū)動程序、鍵處理程序、顯示驅(qū)動程序、監(jiān)控程序等部分組成。細(xì)分驅(qū)動主控制程序控制整個程序的流程,主要完成驅(qū)動的初始化、中斷方式的設(shè)置、計數(shù)器工作方式的設(shè)計及相關(guān)子程序的調(diào)用等。初始化包括8279各寄存器、8279的顯示RAM、AT89C52的中斷系統(tǒng)及內(nèi)部RAM等。在AT89C52的各中斷中,使用了INT1、T0、和T1這3個中斷,其中,INT1為高優(yōu)先級,在運行狀態(tài)下當(dāng)有停止鍵按下時,則INT1中斷服務(wù)程序?qū)0關(guān)閉,從而使步進(jìn)電動機(jī)停止,T0控制每一步的步進(jìn)周期,該服務(wù)程序基本上只作重置定時期和置標(biāo)志位的操作,而其他操作均在主程序中完成。其流程圖如圖3所示。細(xì)分驅(qū)動程序中,細(xì)分電流控制信號的輸出采用單片機(jī)片內(nèi)E?PROM軟件查表法,用地址選擇來實現(xiàn)不同通電方式下的可變步距細(xì)分,從而實時控制步進(jìn)電動機(jī)的轉(zhuǎn)角位置,其流程圖如圖4所示。
 #p#分頁標(biāo)題#e#
#p#分頁標(biāo)題#e#
5 結(jié)束語
本設(shè)計實現(xiàn)的步進(jìn)電動機(jī)恒力矩細(xì)分驅(qū)動控制器,最高細(xì)分達(dá)到256細(xì)分,能夠適應(yīng)大多數(shù)中小微型步進(jìn)電動機(jī)的可變細(xì)分控制較高細(xì)分步距角精度及平滑運行等要求。
該驅(qū)動控制器已用于我們的校內(nèi)科研基金項目“全自動高精度線圈切割機(jī)”的驅(qū)動控制系統(tǒng)中。該切割機(jī)的拖動執(zhí)行元件為三相6拍步進(jìn)電動機(jī),其粗步距角為1.5°,軸齒輪直徑為32mm,故步進(jìn)電動機(jī)送料的粗步進(jìn)位移為: πd×1.5/360=419μm。為進(jìn)一步提高切割機(jī)定位精度和系統(tǒng)的運行平穩(wěn)性,采用上述細(xì)分驅(qū)動控制,細(xì)分級數(shù)為16時,切割定位精度為26.2μm。從運行實際的情況看,該步進(jìn)電動機(jī)驅(qū)動器實現(xiàn)了較高的穩(wěn)速精度和切割精度慣性小,運行可靠,取得了滿意的效果。
相關(guān)文章
- 2020-12-293D打印建模、打印、上色實現(xiàn)與技巧:AutoCAD篇PDF下載
- 2014-08-18某工廠廠房拓展區(qū)控制性詳細(xì)規(guī)劃圖
- 2014-08-05疾病控制中心建筑施工圖下載
- 2013-11-28中式比較復(fù)雜樣式門圖紙大全
- 2013-08-29比較稀有的藝術(shù)砂巖浮雕,園林花盆,園林噴泉,背景墻CAD圖
- 2013-07-24酒店房間詳細(xì)立面、平面圖(有詳細(xì)的強(qiáng)弱電圖帶床頭柜面
- 2013-06-13雙速消防兼平時兩用風(fēng)機(jī)電路圖下載
- 2013-06-12噴淋泵一備一用控制原理圖
- 2013-05-17發(fā)動機(jī)連桿的總成圖、連桿體和連桿蓋的零件圖
- 2013-04-13CAD常用電氣控制原理圖通用圖免費下載