一、納米測量精度光柵傳感器研究和發展
1.1雙光柵測量系統
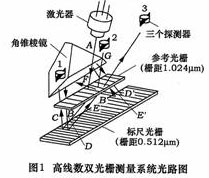
雙光柵是利用兩塊光柵迭合時所形成的莫爾條紋進行測量的。圖1是高線數雙光柵測量系統光路原理圖,這種光柵結構主要包括光源、參考光柵、標尺光柵、角錐棱鏡以及三個光電探測器,其工作原理如圖2,其光路工作過程如下。
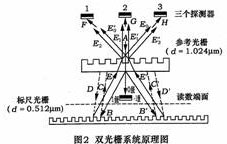
(1)光源發射出的光束A透射過參考光柵以后產生衍射光束,圖中只顯示±1級衍射光B和B'。
(2) B和B'兩束衍射光與角錐棱鏡,標尺光柵采用Littrow自準直安裝,每一束光都首先入射標尺光棚,然后反射后的第1級衍射光進人角錐棱鏡。光束B和B'的第1級衍射光分別為C、C'。
(3)CC'的反射光D,D'從角錐棱鏡出射,并且再次人射標尺光柵,此時與原反射光C, C'發生了平行于光柵刻槽的側向位移。
(4)D,D'的第1級衍射光E, E'重新人射參考光柵,分別產生出射序列,E,E'是對稱人射到參考光柵的同一點,并且它們的出射序列也重合在一起。
(5)在實際使用中,光電探測器1,2,3接收三路出射光F、G、H。取三路光電轉換信號的目的是為了移相,供后續計數細分電路鑒向使用。
此系統使用光棚常數之比等于2的兩根高線數光柵,由獨特的雙光棚結構實現了光學4細分,使光學位移分辨率達到標尺光柵柵距的1/4。加上高倍電子細分,使最終的位移分辨率達到1 nm,其測量范圍等于標尺光棚的長度。
1.2炫耀光柵
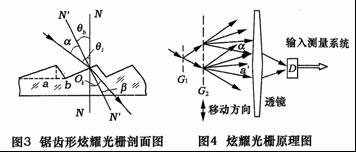
光能量在光棚光譜不同級次上的分配取決于光柵刻槽的幾何形狀。只要改變光柵刻槽的剖面形狀,使之成為如圖3所示的鋸齒狀,就能使衍射的大部分光能量由零級主極大移到所需的級次上,從而克服了透射光柵的光強分布情況中人射光的大部分能量都集中在零級衍射(沒有色散)的主極大上,而在其它級次,尤其是較高級次上光強很小的弱點。具有這種特性的光柵稱為炫耀光柵。在圖3所示的定向透射光棚中,鋸齒的長邊相當于“衍射縫”,短邊為不透光的“縫間隔”,N為平均的光柵表面法線,N'為長邊的法線。設人射光對光柵表面的人射角為θi,對衍射縫的人射角為α,它的某一衍射光對光柵表面的衍射角為θk,而對衍射縫的衍射角為β,θb。是平均的光柵表面法線N和長邊的法線N'的夾角,這些角度之間有如下的關系式
α=θi-θb
β=θk-θb
圖4是一種炫耀光柵測量機構的原理圖,此機構由指示光柵G1,(炫耀光柵)和計量光柵G2組成。精確調整入射光束的人射角,使兩條衍射級光線能量相等,且在兩光柵的空隙間對稱傳播。在經過計量光柵第二次衍射后,出射光α、α'。通過透鏡,在四象限光電管D接收面上相干形成莫爾條紋。可以證明當兩塊光柵相對移動一個細光柵的柵距時,兩束衍射光相位差變化2π,也就是說,干涉條紋明暗變化一個周期,而且這種變化與計量光柵的柵距無關。由于炫耀光柵的柵距比計量光柵小很多倍,所以系統分辨力大大提高。此測量機構與氣浮導軌及紅寶石探頭可組成超精密測量儀,其測量范圍可達0~100 mm,分辨力可達1 nm 。
1.3 基于誤差修正技術的光柵納米測量系統
 #p#分頁標題#e#
#p#分頁標題#e#
通過對光柵測量的系統誤差的檢測、分離和修正的方法,能夠大幅度地提高光柵側量系統的精確度,使之從微米、亞微米級水平進人納米級水平,以實現光柵納米測量,其關鍵技術如下。
1.3.1誤差檢測
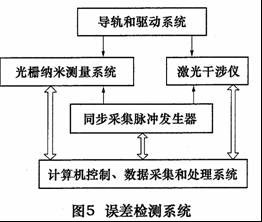
圖5是誤差檢測系統的結構框圖。光棚納米測量系統和激光干涉儀通過精密導軌聯結在一起,測量軸線置于同一條直線上以保證符合阿貝原則。選用同步動態檢測方式,對于光棚納米測量系統和激光干涉儀的測量數據,在由計算機控制的同步采樣脈沖發生器發出的采樣脈沖的觸發下同時刻采樣,并傳給計算機進行處理。
1.3.2誤差分離
光柵納米測量系統的誤差分為周期累計誤差、細分誤差和隨機誤差三類。檢測數據也是這三種誤差成份混合疊加的結果。為了進行系統誤差補償,必須將前兩項誤差從總的誤差檢測結果中分離出來。這三種誤差成份具有不同的頻譜特性,可以很容易地通過傅立葉變換和離散頻譜分析的方法來實現誤差分離;檢測數據中基頻與莫爾條紋空間頻率一致的成分為細分 誤差;將其分離出來后,對剩余的部分進行低通濾波, 去掉高頻的隨機誤差,即得到周期累計誤差。
1.3.3誤差修正
光柵納米測量系統的誤差修正策略有以下幾種。
(1)歸一修正光柵納米測量系統誤差修正的歸一修正是指在全量程的所有位置上,采用相同的修正參數進行系統誤差修正,即對于周期累計誤差,用同一條直線進行線性修正;對于細分誤差,使用同一條細分誤差修正曲線。光柵測量的計算公式為
x=nxW+e(1)
式中,x為光柵修正前的位移量,n為通過的莫爾條紋信號的整周期數的計數值,W代表莫爾條紋信號空間周期的常數,e為細分電路得出的細分量。
設周期累計誤差的固定偏移量為δ,誤差修正系數為β,細分誤差曲線用函數ERR(e)來表示,則修正后的位移量xb的計算公式為

由于光柵測量是相對測量,而在歸一修正法中為固定值,故可令δ為0,而不影響測量結果,于是歸一修正法的計算公式變為

全量程歸一修正意味著修正數值的獲取與當前測量位置無關,可以適用于沒有絕對零位的光柵測量系統,尤其適用于高速光柵納米測量系統。其缺點是在系統誤差比較大的系統中,誤差修正不夠徹底,修正精度不高。
(2)分段修正分段修正就是將全量程根據其誤差特征分為若干段,每一段都有自己的修正參數,按所處段的不同進行不同的修正,即對于周期累計誤差,每一段都按各自的修正函數進行修正;對于細分誤差,每一段都有自己的細分誤差修正曲線。
分段修正法的計算公式為

式中,ERR (k,e)是第k段的細分誤差函數β(k)是第k段周期累計誤差補償系數;δ(k)是第k段的周期累計誤差的固定偏移值。
分段補償法的優點是當分段數足夠多時,可以對系統誤差進行精確的修正。其缺點是要求測量系統有絕對零位,需大量存儲空間存儲表格數據,影響系統整體測量速度。
(3)混合修正以上兩種修正方法,既可單獨使用,也可以交叉混合用來適應不同場合的特殊要求,這就是混合修正。混合修正可以在測量精度和速度之間取得某種折衷。
1.4基于二次莫爾條紋的光柵納米測量系統
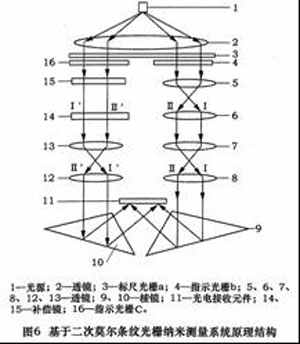
系統結構如圖6所示。圖中,指示光柵b和指示光柵c固定在同一測量基尺上,標尺光柵α分別與指示光柵b和指示光柵。產生兩組一次莫爾條紋信號I-II和I'-II',利用透鏡5和6來調整一次莫爾條紋的移動方向。透鏡7、8和12、13分別將一次莫爾條紋信號I-II和I'-II'縮小,以便有足夠數量的一次莫爾條紋再次干涉形成二次莫爾條紋。當指示光柵b和指示光柵c沿著標尺光柵α相對移動時,指示光柵b和指示光柵c分別和標尺光柵α產生的兩組一次莫爾條紋信號,通過透鏡5和6使兩組一次莫爾條紋信號的移動方向相反。兩組一次莫爾條紋信號通過透鏡7,8和12、13以及棱鏡9、10處理,將在光電接收元件11上干涉產生二次莫爾條紋,通過對二次莫爾條紋信號進行電子細分,可獲得更高的細分測量精度。經過仿真計算,光柵傳感器分辨率達到5. 40 x 10-10 m,測量精度達到納米級。#p#分頁標題#e#
二、光柵納米測量的關鍵技術
2.1基于新型測量原理光柵納米測量系統的研究
基于衍射光學原理的光柵納米測量系統,測量范圍較小,系統復雜,在大位移測量儀器中應用受到限制。基于誤差修正技術的計量光柵納米測量系統,誤差標定、誤差分離、誤差修正程序復雜,且對測量環境要求苛刻。為了滿足測量范圍大、抗干擾能力強的納米測量儀器的需要,必須在測量原理的研究上有所突破。我們基于二次莫爾條紋原理研究的納米測量精度計量光柵傳感器,通過理論計算和仿真,能夠達到納米級測量精度。但是,將理論變成現實產品,需在以下關鍵技術方面進一步研究:(1)納米測量精度光柵傳感器光柵副的設計和研制;(2)二次莫爾條紋形成過程中光能量平衡關系的研究;(3)光電發送和接受元件的特性匹配和優化設計;(4)光電系統的動態特性研究等。
2.2精密機械系統的研制
精密的機械系統是實現光柵納米測量的重要保證。如何設計和制造行程在毫米級或幾十毫米甚至幾百毫米的適合納米級測量精度需要的驅動裝置和導軌,仍是目前需要解決的技術難題。
2.3光電信號處理和細分技術
光柵納米測量中高頻響應與高分辨率之間存在矛盾,有必要研究具有更高頻率響應、高細分份數的莫爾條紋細分技術。光柵納米測量不僅要求有高的細分份倍數,而且要求細分均勻,使其具有高的細分精度和較強的誤差修正潛力。
2.4誤差分離和誤差修正
光柵測量是以實物作為測量基準的,雖然在加工、裝配、調整、信號處理等眾多環節中采取了許多措施,但仍然還有很多誤差因素不可避免,如光柵的刻劃誤差、導軌的直線度誤差、電子元器件的非線性誤差等。由它們引起的測量誤差對于納米級的測量系統來說,仍然是不可忽略的。充分運用誤差修正技術來保證系統的納米級的測量準確度溯源性,是實現光柵納米測量的關鍵技術之一。
2.5測量環境條件
隨著納米測量技術的發展,對工作環境的要求也嚴格。光柵納米測量系統的分辨力高,對環境的變化非常敏感,工作環境對測量準確度的影響已成為非常重要的因素。所以建立適應光柵納米測量的工作環境或進行環境誤差修正也是一個亟待解決的課題。
相關文章
- 2021-04-20中文版AutoCAD 2016機械設計從入門到精通 [CAD輔助設
- 2021-04-11中文版AutoCAD2016機械設計從入門到精通 CAD輔助設計
- 2020-12-27AutoCAD2004簡體中文版32位系統帶注冊機免費下載
- 2016-03-31七天連鎖酒店給排水系統及電器系統圖集下載
- 2016-01-03中國電子科技集團公司第28研究所科研大樓施工圖+效果
- 2015-05-27某研究院泰州青少年活動中心施工圖及效果圖下載
- 2015-03-28某辦公室CAD裝修圖含配電箱系統圖
- 2014-07-31教學樓建筑施工圖CAD圖紙下載
- 2013-08-20化工研究院信息管理大樓施工圖免費下載
- 2013-04-25設計研究院出圖的一套一千多方的精裝修辦公室圖紙