一、引言
鏈傳動是一種廣泛應用的機械傳動形式,被廣泛應用于運輸、起重、建筑和化工等多種機械的動力傳動中。但是由于鏈傳動系統屬于撓性傳動裝置,對其進行精確的數學描述存在諸多困難,而且很多理論的研究結果與實際情況存在較大程度的差異。因此,依靠計算機進行仿真成為了鏈傳動系統研究的一個重要方向。目前,在該領域的研究一般采用在三維建模軟件(如Pro/ENGINEER)中進行鏈輪和鏈節的三維實體建模,之后再導入ADAMS軟件進行仿真分析。但是這一過程造成了工作量大、裝配復雜的問題,而且其中鏈輪和鏈節間約束的定義復雜,求解速度慢。多體動力學軟件RecurDyn為鏈輪傳動系統的分析提供了新思路。
二、動力學模型
1.鏈傳動運動學與動力學特性
鏈傳動的運動學特性,是由于圍在鏈輪上的鏈條由多邊形組成這一性質而形成。鏈條中心線與鏈輪分度圓在運動中交替地呈相切和相割的位置。鏈傳動這一運動學特性被稱為多邊形效應。當主動鏈輪勻速變化時,傳動鏈條的線速度和從動輪的角速度呈周期性變化。多邊形效應使得鏈傳動的傳動過程相對于齒輪等剛性傳動件來說,其傳動過程中的沖擊以及動載荷非常明顯,單純用數學模型描述具有很高的極限性。因此要充分分析鏈傳動的運動學和動力學,可以采用計算機仿真來進行。
2.RecurDyn軟件介紹
RecurDyn軟件是由韓國FunctionBay公司基于遞歸算法開發的多體系統動力學仿真軟件。它采用相對坐標系運動方程理論和完全遞歸算法,非常適合求解大規模以及復雜接觸的多體動力學問題。而且其所開發的成型的模型庫,如齒輪、履帶以及與CAD軟件的接口,為仿真研究提供了全方位支持。從另外一個方面來看,傳統的動力學分析軟件對于機構中普遍存在的接觸碰撞問題解決得不夠完善,這其中包括過多的簡化、求解效率低和求解穩定性差等問題,難以滿足工程的實際需要。在這一點上,RecurDyn求解速度快、穩定性好,不但可以解決傳統的運動學和動力學問題,還能很好地解決機構接觸碰撞問題,拓展了多體動力學軟件的應用范圍。鏈傳動系統本身是由鏈輪和多段鏈節組成,滿足RecurDyn的應用范圍,且在RecurDyn中具有鏈傳動的模型庫,可以滿足參數化設計的要求。
3.MATLAB 軟件介紹
MATLAB作為數值計算的先進工具,其簡易的編程語法結構、種類繁多的調用函數以及與眾多軟件之間的接口再加上其強大的數值計算功能,使之成為科學計算和數學分析的首選工具。本文通過RecurDyn的接口程序用MATLAB作為計算引擎,將其與RecurDyn完美結合,實現優勢互補、強強聯合。
三、動力學模型建立
1.動力學模型參數
我們最終要實現的動力學模型是經過兩級齒輪減速的鏈傳動系統,其中驅動力通過兩級齒輪減速后驅動鏈輪的主動輪。因此整個仿真系統包括減速部分(齒輪與傳動軸)以及鏈傳動部分。前者主要依靠MATLAB的數學模型來搭建,后者在RecurDyn軟件中實現,最后二者通過RecurDyn與MATLAB的接口有機結合成鏈傳動仿真系統。
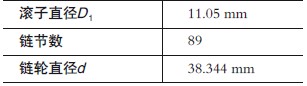
在RecurDyn軟件中,鏈傳動部分的鏈節、主動輪和從動輪是組合后形成一個子系統(Subsystem)來進行仿真的。對該子系統的各個部件進行參數化設計,其具體參數如表所示。

2.鏈傳動系統虛擬樣機的組成
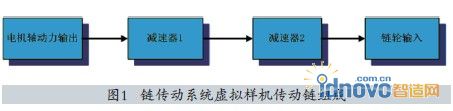
虛擬樣機技術(Virtual Prototyping,VP)是一種基于產品計算機仿真模型的數字化設計方法。以機械系統運動學、多體動力學、有限元分析和控制理論為核心,加上成熟的三維計算機圖形技術和基于圖形的用戶界面技術,以及廣泛的應用網絡技術、信息技術和集成技術等,將分散的產品設計開發和分析過程集成在一起,將虛擬技術與仿真方法相結合,為產品的研發提供了一個全新的設計方法和設計理念。它可以對產品多種設計方案進行快速測試、評估與改進,直到獲得最優的整機性能。由于我們最終的研究目標不僅是要實現鏈傳動本身的仿真研究,更要結合研究課題給出仿真結果,所以就要建立整個電傳動系統的虛擬樣機。該鏈傳動系統動力由電機輸入,通過兩級齒輪減速,最后驅動鏈輪。具體動力傳輸過程,如圖1所示。
四、建模過程
1.三維實體模型的構建
在RecurDyn軟件中,創建一個新的Subsystem,在新的Subsystem中先選擇鏈節的參數,然后依照此參數生成鏈輪,最后通過Assembly命令,實現鏈輪和鏈節之間的裝配關系。下一步進行運動約束的設置,在上一步中隨著鏈輪和鏈節裝配過程的完成,鏈輪和鏈節之間的約束就實現了定義,所以此次約束添加針對的內容主要是兩個鏈輪軸上的轉動約束,這使得兩個鏈輪實現圍繞自身軸線的運動。同時在主動輪(圖2左側輪)上添加轉矩。建好的三維實體模型,如圖2所示。
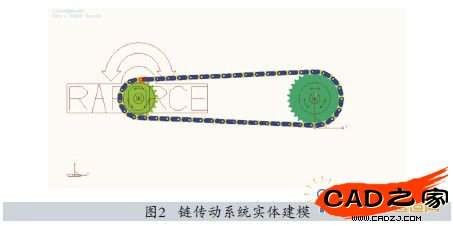
鏈傳動系統三維建模的關鍵就在于鏈輪和鏈節的裝配過程,雖然該過程是由自動完成的,但是在裝配完成后我們應該檢查鏈輪的輪齒與鏈節槽是否正確嚙合。如果沒有正確嚙合,就需要利用RecurDyn中的Object Control工具將鏈輪旋轉一定的角度,直到鏈輪和鏈節正確嚙合為止,否則在仿真時會報出錯誤信息,使仿真過程中止。此外,還可以利用Assembly命令彈出的對話框內對鏈節數在一定范圍內進行重新定義,這樣也可以起到保證鏈輪和鏈節正確嚙合的作用。
虛擬樣機搭建完成后,要對其進行仿真測試,如果仿真成功就可以進行下一步工作,即與MATLAB的聯合仿真,否則要對樣機進行裝配的檢查與調整過程。
2.數學模型的搭建
下一步進行RecurDyn和MATLAB之間的接口的設置,通過在RecurDyn的Control工具箱里設置輸出參數(PlantOutput),該參數是RecurDyn和MATLAB聯合仿真后的輸出結果,輸出的參數有三個:主動輪速度、從動輪速度以及鏈節的加速度,此后設置輸入參數(PlantInput),輸入參數定義為主動輪轉動軸上的力矩輸入。最后,在cosim中設置與RecurDyn文件相關聯的m文件和路徑。完成這些設置后,RecurDyn自動形成Simulink中使用的仿真模塊,在Simulink中根據實際參數調用MATLAB中的SimDriveline工具箱模塊搭建如圖3所示模型,SimDriveline工具箱主要進行車輛以及傳動鏈的動力學仿真。
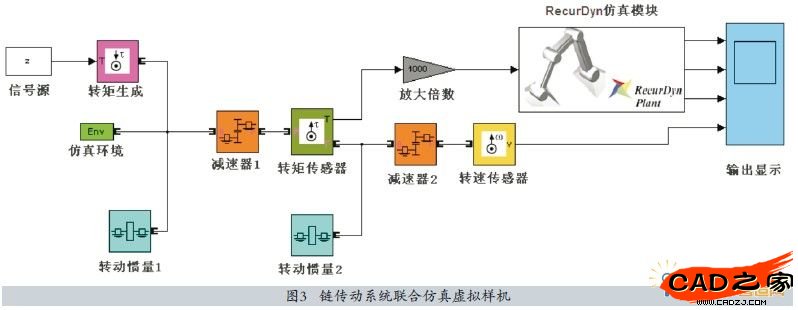
該系統主要模塊功能和定義如下:
◎輸入信號:用戶輸入的扭矩數學信號,可以直接用MATLAB的命令行生成,也可以使用Simulink中的波形發生器生成;
◎轉矩生成:將輸入信號轉化為SimDriveline工具箱中的轉矩信號;
◎轉動慣量:表示動力輸入的軸的轉動慣量,分別為1.65×10-3 、1.58×10-4 ;
◎減速器:代表了實際傳動系統中的兩級減速器,減速比分別為1和13/19;
◎轉矩傳感器:將SimDriveline工具箱的轉矩信號轉化為RecurDyn接受的數學信號;
◎轉速傳感器:提取傳動系統的轉速用以顯示;
◎放大倍數:將MATLAB的信號(單位N×m)轉化為RecurDyn的信號(單位N×mm)。
五、仿真結果與分析
設定輸入為20倍單位階躍信號(即輸入為20N×m),設置仿真時間為10s,步長為10可以得到主動輪和從動輪的角速度,如圖4所示。
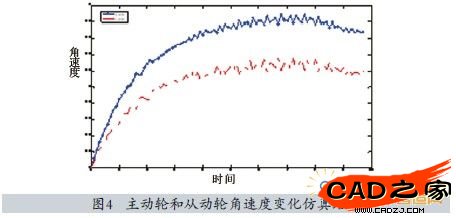
從圖4中,我們可以明顯看出,在0s到1.8s時間內,主動輪和從動輪的角速度都在緩慢增加,而且從動輪的角加速度要低于主動輪的角加速度。究其原因,主要是由于從動輪的齒數少于主動輪,且鏈條為撓性傳動機構,因此要發生一定的形變。在1.8s到3.3s時間內,主動輪和從動輪的速度呈現周期性波動變化,二者波形近似,且從動輪角速度與主動輪的角速度明顯相差一個相位,這應該是由于鏈節嚙合引起的。而且在這一階段,主動輪和從動輪開始正確嚙合,在嚙合過程中,一個現象非常明顯,那就是鏈傳動的多邊形效應,這是由于鏈條中心線與鏈輪分度圓在運動中交替地呈相切和相割的位置引起的。3.3s到10s的時間內,主動輪和從動輪的傳動進入穩定階段,其成因應該是鏈條經過在主動輪和從動輪交替嚙合,其鏈節的形變已相對穩定,并且產生了一定程度的應變,這使得整個鏈條上的應力均勻分布,故此時進入穩定傳動階段。
在平穩傳動階段計算此鏈傳動的傳動比,取3.3s到10s間主動輪和從動輪的角速度數值,并取平均值,得到實際傳動比為 ,而根據理論計算,其理論傳動比應為
,而根據理論計算,其理論傳動比應為 ,由此可見二者的結果是非常吻合的,這也進一步說明選擇平穩傳動階段計算傳動比的正確性。
,由此可見二者的結果是非常吻合的,這也進一步說明選擇平穩傳動階段計算傳動比的正確性。
通過仿真還可以得到鏈條中一個鏈節張緊力的變化情況,如圖5所示。
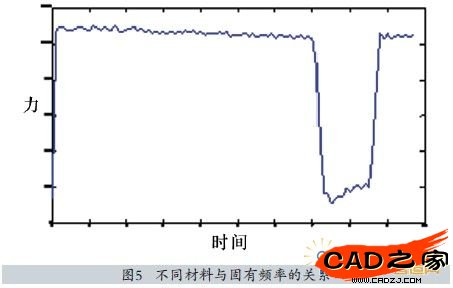
從圖5中可以明顯看出,在7s~8.8s之間,張緊力急劇減小,其原因是該鏈節在此段時間內正好從鏈輪嚙出,故張緊力減小,之后由于再次進入主動輪嚙合的過程,張緊力恢復到正常水平。在0~7s中,鏈節張緊力均值為1063N,這與理論值1050N基本一致。
綜上所述,通過該仿真系統,可以全面實現鏈輪,鏈節運動情況和受力情況的仿真,其仿真結果與實際情況非常吻合。
整體仿真計算過程共計10min,可見其仿真速度是符合要求的。
通過建立該虛擬樣機,不僅實現了分析鏈傳動的運動和動力學特性,而且將整個傳動系統的參數和運動學特性都體現了出來,如果在后期需要考慮加入系統的非線性特征以更加貼近實際系統,如傳動件之間的摩擦以及齒隙等問題,可以通過對MATLAB中的模型增加相應的模塊來實現仿真要求。從這一點上來看,該鏈傳動系統聯合仿真虛擬樣機具有很強的可擴展性。
六、結束語
本文通過運用RecurDyn和MATLAB軟件中的SimDriveline工具箱,搭建了鏈傳動系統的虛擬樣機,并在此基礎上實現了鏈傳動系統虛擬樣機的動力學仿真,進一步分析了鏈輪嚙合傳動在運動學和動力學上的特點。整個系統具有建模簡單、仿真效率高和易于擴展等優點。該仿真系統充分體現了使用虛擬樣機技術的優越性。該虛擬樣機的建立也為后期的研究工作,即實現車輛整體的運動仿真打下了堅實的基礎。
相關文章
- 2021-07-31AutoCAD高級教程-全國CAD培訓中心基于AutoCAD2002教材
- 2020-12-27AutoCAD2004簡體中文版32位系統帶注冊機免費下載
- 2020-12-19AutoCAD 、SolidWorks實體仿真建模與應用解析 [芮勇勤
- 2016-08-01運動寶貝早教機構江蘇丹陽中心施工圖下載
- 2016-03-31七天連鎖酒店給排水系統及電器系統圖集下載
- 2015-03-28某辦公室CAD裝修圖含配電箱系統圖
- 2014-07-31教學樓建筑施工圖CAD圖紙下載
- 2013-06-12非標銑頭機床傳動裝置裝配圖
- 2013-05-20蝸桿蝸輪傳動全焊接固定球閥
- 2013-03-04反鏟式挖掘機運動仿真(有模型、動畫、參數設置、包絡圖