麥弗遜懸架在目前是大多數(shù)中小型轎車前懸架所首選的類型,對(duì)于麥弗遜懸架的下控制臂來說主要在加速、制動(dòng)、過坎是承受縱向力,以及在轉(zhuǎn)向是承受側(cè)向力,對(duì)于垂向力下控制臂只是抵消前后橡膠襯套被扭轉(zhuǎn)變形時(shí)的一些結(jié)構(gòu)反力,垂向力主要由滑柱彈簧來承受,由于作用在控制臂上的垂向力在數(shù)量級(jí)上遠(yuǎn)小于縱向力及側(cè)向力,所以在校核下控制臂時(shí)通常不考慮垂向力。麥弗遜懸架的受力情況如圖1所示。
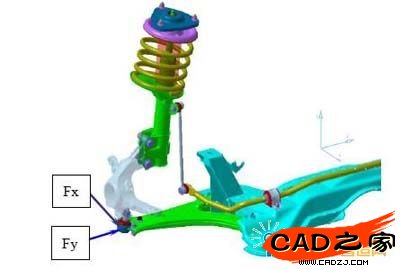
圖1 優(yōu)化前控制臂模型
圖2所示為優(yōu)化前的控制臂,材料為鍛鋼40Cr 為了保證足夠的轉(zhuǎn)彎半徑,控制臂的結(jié)構(gòu)設(shè)計(jì)空間較小,有應(yīng)力集中區(qū)域如圖3所示。

圖2 優(yōu)化前控制臂模型

圖3 優(yōu)化前控制臂結(jié)構(gòu)示意
新款車型在原有車型基礎(chǔ)之上,加寬了前輪距。也即輪心坐標(biāo)外移,其他硬點(diǎn)不做改動(dòng),這樣控制臂多出結(jié)構(gòu)優(yōu)化空間,如圖4比較所示。
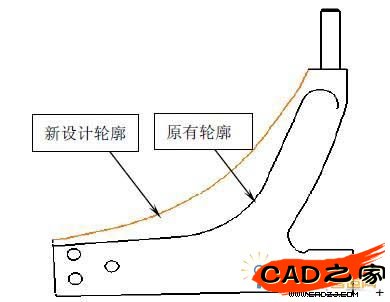
圖4 控制臂新的設(shè)計(jì)邊界
2 有限元模型的建立
2.1 建立設(shè)計(jì)邊界
根據(jù)布置情況利用CAD軟件建立起設(shè)計(jì)邊界模型,如圖5所示。
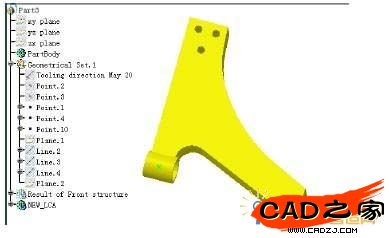
圖5 新的控制臂拓?fù)鋬?yōu)化邊界
2.2 優(yōu)化前處理
2.2.1 網(wǎng)格劃分
將建立的拓?fù)鋬?yōu)化邊界導(dǎo)入HyperMesh 劃分網(wǎng)格,單元類型采用一階四面體單元,最終網(wǎng)格劃分情況如圖6所示。
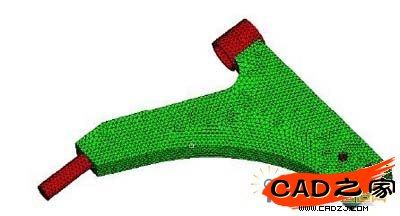
圖6 劃分網(wǎng)格
2.2.2 添加材料
創(chuàng)建出各向同性金屬材料,參考手冊(cè)或詢問供應(yīng)商得知其彈性模量及泊松比,如圖7所示。
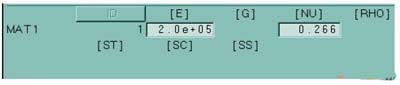
圖7 添加材料
2.2.3 設(shè)置屬性
劃分優(yōu)化區(qū)域及非設(shè)計(jì)區(qū)域,因?yàn)橥負(fù)鋬?yōu)化區(qū)域是由屬性來識(shí)別的,所以通過多個(gè)屬性可區(qū)分設(shè)計(jì)及非設(shè)計(jì)區(qū)域,本例中將控制臂前襯套外圈、后襯套芯軸、外球銷點(diǎn)緊固螺栓孔設(shè)置為非設(shè)計(jì)區(qū)域,其他為設(shè)計(jì)區(qū)域,如圖8所示。
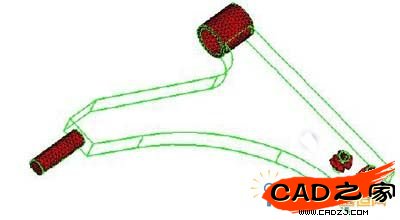
圖8 劃分設(shè)計(jì)、非設(shè)計(jì)區(qū)域
2.2.4 連接關(guān)系建立
使用RBE2 單元將外球銷點(diǎn)與三個(gè)緊固螺栓孔內(nèi)壁節(jié)點(diǎn)連接、相同的操作將前后襯套中心點(diǎn)與對(duì)應(yīng)節(jié)點(diǎn)連接。
2.2.5建立邊界條件
麥弗遜懸架控制臂分析時(shí)通常固定前襯套X、Y、Z三個(gè)方向平動(dòng)(1、2、3),后襯套點(diǎn)Y、X方向平動(dòng)(2、3),外球銷點(diǎn)Z方向平動(dòng)(1),Loadtype 選擇SPC,結(jié)果如圖9所示(坐標(biāo)系為整車坐標(biāo)系)。
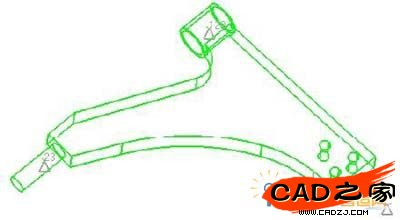
圖9建立邊界條件
2.2.6 施加載荷
根據(jù)已有的整車參數(shù)計(jì)算出制動(dòng)、轉(zhuǎn)向工況時(shí)的縱向、側(cè)向力分成兩個(gè)Load 施加到外球銷點(diǎn)上,如圖10所示。
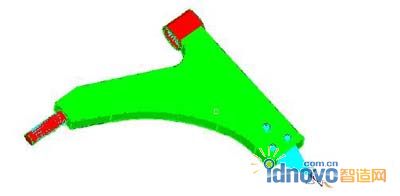
圖10 添加載荷
2.2.7建立工況
利用上兩步所創(chuàng)建出的邊界條件及載荷分別組合起來創(chuàng)建出制動(dòng)、轉(zhuǎn)向兩種工況,表1所示為模型前處理信息。

2.2.8 建立拓?fù)鋬?yōu)化變量
進(jìn)入Optimization 模塊Topology 菜單選擇設(shè)計(jì)區(qū)域?qū)傩裕愋瓦x擇PSOLID 創(chuàng)建優(yōu)化變量,進(jìn)入Draw 面板設(shè)置拔模方式為SPLIT 選擇從中心面往外兩側(cè)拔模,如圖11所示,Obstacle 選擇非設(shè)計(jì)區(qū)域?qū)傩浴?/p>
圖11 設(shè)置拔模方向#p#分頁標(biāo)題#e#
2.2.9 建立優(yōu)化響應(yīng)
進(jìn)入response 面板分別建立類型為Volumefrac、Weighted Comp的連個(gè)相應(yīng),其中Weighted Comp 在Loadstep 中將制動(dòng)、轉(zhuǎn)向工況都選中且權(quán)重均衡。
2.2.10建立優(yōu)化約束
進(jìn)入Dconstraints 面板選擇上一步所建立的類型為Volumefrac 的響應(yīng),設(shè)置其上限值0.3,如圖12所示。
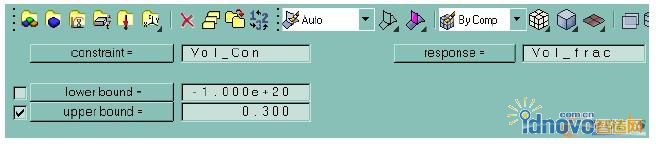
圖12 設(shè)置優(yōu)化約束
2.2.11建立優(yōu)化目標(biāo)
進(jìn)入Objective 面板,選擇第10步所創(chuàng)建的類型為Weighted Comp 的響應(yīng)設(shè)置其目標(biāo)為最小。
2.2.12 設(shè)置輔助卡片
如果需要可以設(shè)置一些輔助卡片,比如SCREEN 卡片,PARAM 卡片。
3 提交求解
保存 .fem 文件,設(shè)置合適的內(nèi)存空間后調(diào)用OptiStruct 解算器進(jìn)行求解。
4 優(yōu)化結(jié)果后處理
經(jīng)過28步的迭代,結(jié)果收斂。打開HyperView 查看結(jié)果,將單元密度閥值設(shè)置為0.3 ,結(jié)果如圖13所示。

圖13 優(yōu)化結(jié)果
返回HyperMesh窗口,在后處理Post 面板將第28步結(jié)果讀入,并使用OSSmooth 命令將優(yōu)化后的單元格光順成ISO 曲面,ISO 曲面閥值同樣取0.3結(jié)果如圖14所示。

圖14 光順后的結(jié)果
5 CAD 模型的重建
參考輸出的結(jié)果曲面,利用CAD 軟件對(duì)控制臂模型進(jìn)行參數(shù)化重建,結(jié)果如圖15所示。
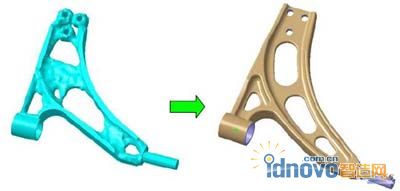
圖15 控制臂參數(shù)化模型的重建
6 重建模型的驗(yàn)證
重建的CAD 模型必須要經(jīng)過CAE 分析方可凍結(jié),關(guān)于CAE 分析步驟,此處從略。下面主要將模型結(jié)構(gòu)及CAE 結(jié)果與原方案進(jìn)行對(duì)比。

6.1 剛度比較
控制臂剛度對(duì)車輪的外傾、前束等參數(shù)的穩(wěn)定有很大關(guān)系,所以控制臂在受力時(shí)的彈性變形大小是考核控制臂設(shè)計(jì)優(yōu)劣的一個(gè)關(guān)鍵參數(shù),圖16、17分別時(shí)優(yōu)化前后控制臂在相同的制動(dòng)力作用下的變形情況,會(huì)發(fā)現(xiàn)優(yōu)化后結(jié)果優(yōu)于優(yōu)化前結(jié)果。

圖16 優(yōu)化前控制臂縱向變形
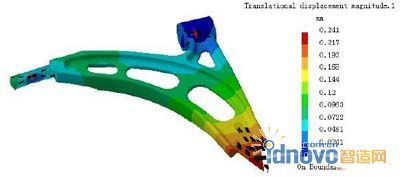
圖17 優(yōu)化后控制臂縱向變形
6.2 模態(tài)比較
分別對(duì)優(yōu)化前及優(yōu)化后控制臂模型進(jìn)行約束模態(tài)分析, 圖18左右分別時(shí)優(yōu)化前及優(yōu)化后模型的一階彎曲振形,對(duì)應(yīng)的固有頻率為305Hz 和325Hz 可見優(yōu)化后模型其剛度值提高。
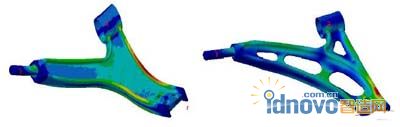
圖18 優(yōu)化前后模型的一介彎曲模型
7 結(jié)論
本文主要介紹了利用HyperWorks 軟件進(jìn)行麥弗遜懸架控制臂的結(jié)構(gòu)優(yōu)化、模型重建、模型校核、方案對(duì)比等內(nèi)容。著重闡述了實(shí)體結(jié)構(gòu)件的優(yōu)化流程。通過優(yōu)化使控制臂材料達(dá)到一個(gè)最優(yōu)化的分布,在既定的條件下使控制臂的用料最少,對(duì)應(yīng)的質(zhì)量也最小,作為車輛簧下重量,控制臂的質(zhì)量越小,整車的舒適性也越好。
隨著燃油價(jià)格的普遍上漲,車輛輕量化設(shè)計(jì)已經(jīng)越來越被各OEM廠家重視,本文通過一個(gè)完整的流程來證明只要是零部件就有優(yōu)化的空間。只要在優(yōu)化時(shí)設(shè)置好優(yōu)化的約束及模型的優(yōu)化參數(shù),實(shí)現(xiàn)模型優(yōu)化與工藝性是可以統(tǒng)一的。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF