1 引言
編制自由曲面數(shù)控加工程序時(shí),首先需根據(jù)設(shè)計(jì)意圖生成描述自由曲面的數(shù)學(xué)模型,然后根據(jù)該模型生成數(shù)控加工刀位點(diǎn)(CL點(diǎn))軌跡。為保證在數(shù)控加工過(guò)程中不會(huì)發(fā)生刀具干涉,需對(duì)生成的刀位點(diǎn)軌跡進(jìn)行刀具干涉判別。由于刀具干涉現(xiàn)象嚴(yán)重影響數(shù)控加工質(zhì)量,因此刀具干涉判別方法作為數(shù)控加工自動(dòng)編程中的一個(gè)關(guān)鍵問(wèn)題受到了廣泛重視。刀具干涉可分為刀具底面干涉和刀具側(cè)面干涉(即刀桿碰撞干涉)。目前提出的刀具干涉判別方法(如參數(shù)線法、截面線法、多面體曲面加工算法等)一般是基于自由曲面與刀具形狀的幾何關(guān)系建立的,算法較復(fù)雜,且與自由曲面刀具軌跡計(jì)算方法有關(guān),對(duì)于刀具底面干涉和刀具側(cè)面干涉需采用不同的判別算法,因此應(yīng)用范圍受到一定限制。本文基于模式識(shí)別原理,采用基于模糊推理的自由曲面描述方法,提出一種適用于不同刀具類型并可同時(shí)考慮刀具底面干涉和側(cè)面干涉的刀具干涉判別算法。該算法將刀具(包括刀桿)離散為若干個(gè)刀具特征點(diǎn),將一組描述自由曲面的模糊規(guī)則視為模式邊界,采用模式識(shí)別方法判別刀具特征點(diǎn)所處位置,當(dāng)其位于自由曲面上或其上方時(shí),可判定無(wú)刀具干涉;當(dāng)其位于自由曲面下方時(shí),則判定將發(fā)生刀具干涉。對(duì)模糊推理技術(shù)的研究表明,一組奇數(shù)的三角形模糊劃分區(qū)域數(shù)目,可以任何精度近似表示一個(gè)連續(xù)函數(shù)。此外,無(wú)論何種刀具,其底部與刀桿均可通過(guò)一些刀具特征點(diǎn)進(jìn)行描述。因此,本文提出的刀具干涉判別方法具有廣泛適用性。
2 基于模糊推理的自由曲面模型
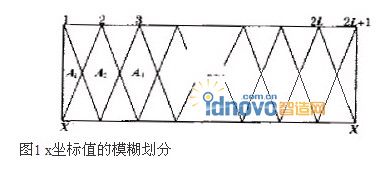
設(shè)自由曲面的采樣數(shù)據(jù)為(x1,y1,z1),(x2,y2,z2),…,(xn,yn,zn)。首先將這些數(shù)據(jù)轉(zhuǎn)換為模糊域中的數(shù)據(jù),設(shè)該曲面x、y、z的值域區(qū)間分別為[x-,x+]、[y-,y+]和[z-,z+],將該區(qū)間分別劃分為等寬度的2L+1、2M+1和2N+1個(gè)區(qū)域(L、M、N 為整數(shù)),L、M、N值的大小取決于描述曲面的精度,x、y、z值域的每個(gè)劃分區(qū)域?qū)挾染鶓?yīng)小于該方向上的允許誤差分量。由于一組奇數(shù)的三角形模糊劃分的模糊規(guī)則可以任何精度逼近一個(gè)連續(xù)函數(shù),因此將各區(qū)域的隸屬函數(shù)取為圖1所示的三角形狀。這種劃分方法可保證每個(gè)測(cè)量數(shù)據(jù)均對(duì)應(yīng)有隸屬度大于0.5的規(guī)則匹配。
設(shè)自由曲面在x、y、z 三個(gè)坐標(biāo)方向分別被劃分為模糊域(A1,A2,…,A2L+1)、(B1,B2,…,B2M+1)和(C1,C2,…,C2N+1),并以ai、bi、ci分別標(biāo)記模糊域Ai、Bi、Ci的中點(diǎn)值。根據(jù)三角形隸屬函數(shù)表達(dá)式 µAi(x)= { (x-ai-1)/(ai-ai-1) (ai-1≤x≤ai)
(-x+ai+1)/(ai+1-ai) (ai≤x≤ai+1)
0 (其它)
(1)
可計(jì)算出x 坐標(biāo)值隸屬于Ai的隸屬度值。同樣,分別以bi和ci替代式(1)中的ai,可得到y(tǒng)、z 坐標(biāo)值隸屬于Bi、Ci的隸屬度值。通過(guò)自由曲面上已知點(diǎn)集(xi,yi,zi),可確定一組描述自由曲面的模糊規(guī)則,即
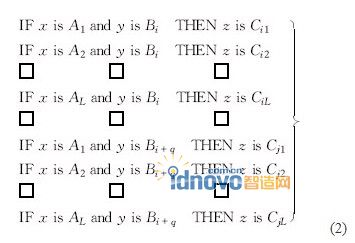
當(dāng)已知(xi,yi,zi)為自由曲面上的一點(diǎn)時(shí),即可產(chǎn)生上述規(guī)則組中的一個(gè)規(guī)則。首先由式(1)計(jì)算其隸屬于某區(qū)域的最大隸屬度值,例如,xi、yi和zi對(duì)應(yīng)區(qū)域A2、B1和C3的隸屬度值為最大,則可產(chǎn)生如下規(guī)則:
IF x is A2and y is B1 THEN z is C3按此方法,n個(gè)數(shù)據(jù)點(diǎn)即可產(chǎn)生n個(gè)規(guī)則。但由于每個(gè)模糊區(qū)域可能包含多個(gè)數(shù)據(jù)點(diǎn),因此可能發(fā)生規(guī)則的條件部分相同、但結(jié)果不同的情況,即發(fā)生規(guī)則沖突。為解決此問(wèn)題,可采用對(duì)規(guī)則加權(quán)的方法確定最終有效的規(guī)則。
根據(jù)模糊理論,可計(jì)算第k個(gè)規(guī)則條件部分為真的隸屬度值,即 µk(x,y)=µAi(x)∧µBj(y)=min[µAi(x),µBj(y)] (3)
記T為滿足µk(x,y)≥0.5的(x,y,z)數(shù)據(jù)集,并令 e= ∑(xi,yi,zi)∈Tµk(xi,yi)zi
∑(xi,yi,zi)∈Tµk(xi,yi)
(4)
據(jù)此可確定模糊規(guī)則的結(jié)果為:e 值對(duì)應(yīng)的最大隸屬度值的區(qū)域?yàn)镃r。
3 刀具干涉的判別
刀具特征點(diǎn)的抽取
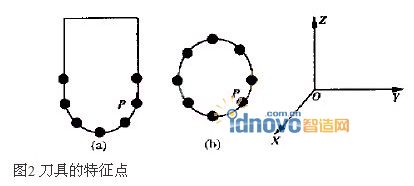
對(duì)于圖2所示刀具,取刀位點(diǎn)P作為刀具坐標(biāo)系原點(diǎn),并抽取若干點(diǎn)(xti,yti,zti)(i=1,2,…,m),作為刀具特征點(diǎn)。
在采用球頭銑刀進(jìn)行三坐標(biāo)數(shù)控加工時(shí),刀位點(diǎn)(即CL點(diǎn))P 在工件坐標(biāo)系中的坐標(biāo)值可由零件表面與刀具表面接觸點(diǎn)(即CC點(diǎn))沿法矢方向偏移刀具半徑R 后求得。而刀具特征點(diǎn)在工件坐標(biāo)系中的坐標(biāo)為相對(duì)刀位點(diǎn)P 的坐標(biāo)偏移量xti、yti和zti值。對(duì)于其它刀具形狀,可采用類似方法計(jì)算出刀具特征點(diǎn)在不同CL點(diǎn)處的坐標(biāo)值。
刀具干涉的判別
當(dāng)?shù)毒咛卣鼽c(diǎn)集位于由CC點(diǎn)構(gòu)成的曲面上方時(shí),無(wú)刀具干涉現(xiàn)象發(fā)生,否則判為有干涉現(xiàn)象發(fā)生。由CC點(diǎn)構(gòu)成的曲面可通過(guò)上述方法表示為式(2)所示的模糊規(guī)則形式,設(shè)(xti,yti,zti)為某一刀具特征點(diǎn),xti、yti的坐標(biāo)值分別位于區(qū)間[aj,aj+1]和[bi,bi+1]內(nèi),由式(1)可分別計(jì)算出隸屬度µAj(xti)、µAj+1(xti)和µBi(yti)、µBi+1(yti)。
根據(jù)模糊規(guī)則清晰化方法,在CC點(diǎn)構(gòu)成的曲面中,對(duì)應(yīng)xti、yti坐標(biāo)的z坐標(biāo)值計(jì)算式為
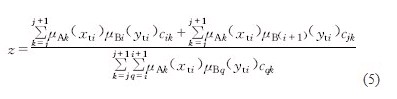
當(dāng)zti≥z 時(shí),表明刀具特征點(diǎn)位于曲面之上,無(wú)刀具干涉現(xiàn)象發(fā)生;當(dāng)zti當(dāng)在某CC點(diǎn)處判定有刀具干涉現(xiàn)象發(fā)生時(shí),對(duì)于刀具底面干涉,可更換較小尺寸的刀具;對(duì)于刀具側(cè)面干涉,則需調(diào)整刀軸與曲面法向矢量的夾角大小以消除干涉,該角度值可采用遺傳算法確定,具體方法可蔡錦達(dá)、李郝林所著《基于生物遺傳學(xué)的機(jī)器人位姿控制方法》(發(fā)表與《應(yīng)用科學(xué)學(xué)報(bào)》1999年第2期)中確定機(jī)器人位姿控制參數(shù)的計(jì)算方法。

4 多值自由曲面的處理
圖3所示曲面形狀是引起刀具側(cè)面干涉的主要原因,這種曲面對(duì)應(yīng)于相同的x、y 坐標(biāo)將出現(xiàn)兩個(gè)以上的z 坐標(biāo)值。對(duì)于這種自由曲面的描述,需對(duì)模糊規(guī)則(2)進(jìn)行修正,即可能出現(xiàn)以下多層規(guī)則表達(dá)方式:
第一層:IF x is A2 and y is B1 THEN z is C2
第二層:IF x is A2 and y is B1 THEN z is C4
為正確產(chǎn)生這種多層規(guī)則,需對(duì)規(guī)則的學(xué)習(xí)算法進(jìn)行修正,即在式(4)的計(jì)算中,將滿足µk(x,y)≥0.5的(x,y,z)數(shù)據(jù)集根據(jù)z 坐標(biāo)的大小(可根據(jù)曲面具體情況確定一個(gè)閾值e,當(dāng)|z1-z2|≥e時(shí),說(shuō)明z1與z2不屬于同一層)區(qū)分為若干個(gè)子集,利用每個(gè)子集的數(shù)據(jù)分別進(jìn)行式(4)的計(jì)算。此時(shí),每個(gè)子集將對(duì)應(yīng)一個(gè)規(guī)則,將z 坐標(biāo)最小的規(guī)則作為第一層規(guī)則,其余則按z 坐標(biāo)值的大小排序,依次作為第二、第三層規(guī)則。
對(duì)于以多層規(guī)則描述的曲面,其刀具干涉的判別算法也應(yīng)作相應(yīng)修正,如對(duì)于圖3所示的三層規(guī)則,刀具干涉判別規(guī)則為:①刀具特征點(diǎn)位于第一層下面。或者②刀具特征點(diǎn)位于第二層之上,且位于第三層之下。

5算例
為檢驗(yàn)本方法的有效性,利用AutoCAD分別設(shè)計(jì)了一個(gè)直紋面和一個(gè)孔斯曲面,并將圖形信息轉(zhuǎn)換為數(shù)據(jù)交換文件(*.DXF文件),然后通過(guò)VisualC++調(diào)用該曲面數(shù)據(jù)文件,根據(jù)上述方法判別曲面干涉情況,最后用腳本文件(*.SCR文件)將計(jì)算結(jié)果在AutoCAD中顯示出來(lái),如圖4所示,圖中黑色區(qū)域?yàn)榈毒甙l(fā)生干涉的區(qū)域。由此可見(jiàn),本文提出的方法可有效應(yīng)用于自由曲面數(shù)控加工的刀具干涉判別。
6 結(jié)論
本文提出的刀具干涉判別方法適用于不同刀具類型,并可同時(shí)對(duì)刀具底面干涉和刀具側(cè)面干涉進(jìn)行判別,為解決數(shù)控加工中的刀具干涉問(wèn)題提供了新方法,其主要應(yīng)用步驟為:
根據(jù)各類自由曲面的描述模型,生成一個(gè)自由曲面數(shù)據(jù)集(xi,yi,zi)(i=1,2,…,n);
按照本文第2節(jié)所述方法,建立一組描述自由曲面的模糊規(guī)則(2);
按照本文第3節(jié)給出的刀具干涉判別算法,對(duì)刀具干涉情況進(jìn)行判別和處理。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF