1 引言
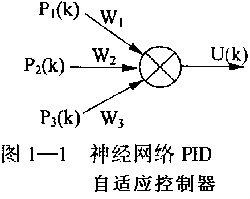
系統是針對制氧機廠W160型落地鏜床X、Y、Z3個進給最高轉速為3 000r/min,最低轉速≤30r/min的直流電動機,實現靜態無靜差S=0、調速范圍D≥1 000;動態電流超調量σι/%≤5%、速度超調量σn%≤10%無級調速系統。直流可逆雙閉環調速系統中,需要兩級PID控制器進行調節,但要實現如此高精度的調速,單純采用常規的PID控制器,很難達到系統的要求。隨著神經網絡理論的發展,將應用最廣泛的PID控制器與具有自學習功能的神經網絡相結合,已成為智能控制的一個新方向,并在這一方面取得了一些研究成果 [2,3]。其中由單神經元構成的PID自適應控制器,是將PID控制規律融進神經網絡之中,實現神經網絡與PID控制規律的本質結合,共同完成PID白適應調節。其網絡結構如圖1—1所示,它是由比例、積分、微分2個單元組成的一種動態前向網絡,各層神經元個數、連接方式、連接權值是按PID控制規律的基本原則和已有的經驗確定的,能夠保證系統的穩定和快速收斂。文中用PLC實現神經網絡PID自適應控制,并應用于直流邏輯無環流可逆調速控制系統,使系統的控制精度達到了只有理論上才能實現的無靜差。
2 PLC控制系統的組成
根據W160型落地鏜床直流調速系統動、靜態性能指標的要求,考慮到該設備的控制設備、器件數量多、對系統運行安全可靠提出的更高要求,采用高可靠性的PLC作為控制核心,以晶閘管為執行機構的直流調速控制系統,取代原設備的交流電動機一發電機一直流電動機龐大的調速系統。PLC實現的調速系統如圖2—1所示。系統主要由兩部分構成,系統框圖如圖2—2所示。其中PLC實現神經網絡PID自適應控制器與邏輯無環流雙閉環的控制部分,長劃線一點一點虛線框內為(V--M)三相橋式晶閘管一電動機系統,GT為V--M系統的晶閘管觸發電路,它由硬件實現。短劃線虛線框內為換向軟開關,由PLC軟件實現。
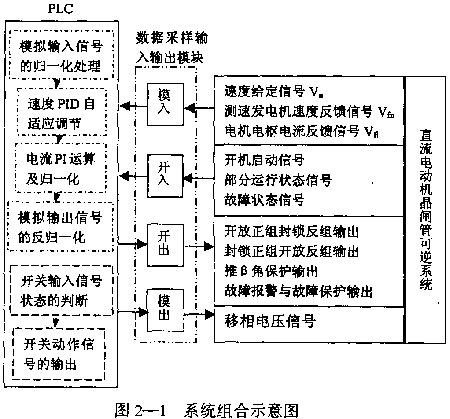
該系統為速度、電流雙閉環調速系統,也就是說PLC對這3個模擬輸入信號分別進行速度調節器和電流調節器相串聯的兩級PID運算,向晶閘管的觸發電路給出移相電壓信號。所以,系統跟隨的快速性及控制精度關鍵取決于PID調節器的設計和調節精度。采用單神經元組成的PID自適應控制器,既有傳統PID控制器的優點,又有神經網絡的并行結構和學習記憶功能,并且結構簡單,易于實現,所以它更適合于控制系統。
3 PID自適應控制器
常規PID控制算法為:
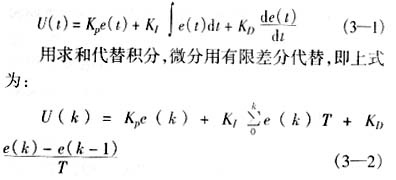
式(3-2)中T為采樣周期,Kp是比例系數,K1=Kp=TI是積分比例系數,KD=KPTD是微分比例系數。
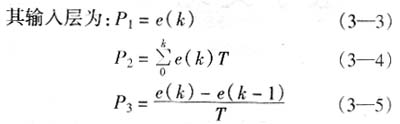
根據上式,組成由兩層線性神經網絡構造的控制器,如圖1—1所示。
以梯度法可得神經網絡PID控制系數修正式:
其中r為系統給定值,Y為系統輸出值,Lr為學習步長:0<Lr<1
對于Wi的初值及學習步長,它不僅關系到是否達到全局最小點,而且也影響學習時間的長短#p#分頁標題#e#[4]。對于該文所針對的高精度、快響應系統尤為重要。
4 基于PLC的自適應控制方法
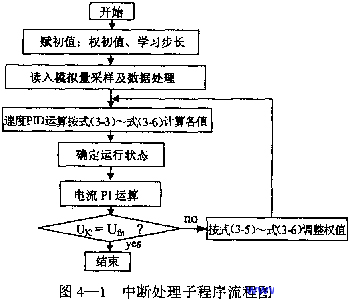
在直流雙閉環調速系統中,為了提高系統響應的快速性和限流的必要性,電流內環仍然采用傳統的PI調節器,而轉速環則采用神經網絡PID自適應控制器,以提高系統的魯棒性。這兩級相串聯的PID運算都由PLC實現,把這一運算環節作為中斷程序來處理。PLC的PID自適應控制中斷處理子程序流程如圖4—1所示。
根據系統所要實現的功能以及PLC順序執行程序的特點,編寫PLC的程序。
選用西門子公司S7—200系列的PLC進行系統配置。根據邏輯無環流可逆直流調速系統實際運行的要求,PLC主要實現了兩級串聯PID自適應調節及邏輯換向。同時,還實現了系統保護功能和系統顯示功能。
5 結束語
用PLC實現的神經網絡PID自適應控制器應用于調速系統,控制精度高,而且經濟可靠、抗干擾能力強,在允許負載、電樞電阻和轉動慣量變化的范圍內,都能保持響應的快速性以及無靜差、無超調的優良性能。它特別適用于機床控制系統,既可以實現調速部分,同時也可利用PLC順序控制的應用特點,替代其余的繼電器控制部分,這樣可使系統結構緊湊,便于維護。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-28計算機輔助設計與制造 21世紀全國應用型本科大機械系
- 2021-08-27計算機輔助設計與制造 21世紀全國應用型本科大機械系
- 2021-08-23零基礎學AutoCAD 2012電氣制圖工程應用 [張立富,陳剛,彭
- 2021-08-22AutoCAD 室內裝潢設計應用大全中文版 [馬永志,鄭藝華,劉
- 2021-08-22AutoCAD 2013應用與開發系列中文版AutoCAD 2013室內裝
- 2021-08-22AutoCAD 2013應用與開發系列中文版AutoCAD 2013機械圖
- 2021-08-14新編AutoCAD 2004中文版計算機輔助設計應用技能培訓教