1 引言
隨著電機(jī)技術(shù)的發(fā)展,人們逐漸認(rèn)識(shí)到了普通圓柱式電機(jī)存在著一些自身結(jié)構(gòu)無(wú)法克服的弱點(diǎn),如電機(jī)冷卻困難、鐵心利用率低等問(wèn)題。因此,軸向磁場(chǎng)永磁電機(jī)逐漸受到了電機(jī)界的重視。軸向磁場(chǎng)永磁電機(jī)有效地利用定子鐵心內(nèi)徑到轉(zhuǎn)軸的空間,從而大幅縮短傳統(tǒng)電機(jī)繞組端部的軸向尺寸,轉(zhuǎn)矩密度可提高20%左右。
軸向磁場(chǎng)永磁電機(jī)的結(jié)構(gòu)和傳統(tǒng)電機(jī)有很大的區(qū)別,其顯著特點(diǎn)是定子和轉(zhuǎn)子是環(huán)型結(jié)構(gòu),電樞繞組的有效導(dǎo)體在空間呈徑向輻射分布,線(xiàn)負(fù)荷隨著半徑的增加而減小;磁路的飽和程度也不一樣, 在內(nèi)圓附近是齒飽和,而在外圓附近是軛飽和。軸向磁場(chǎng)永磁電機(jī)內(nèi)部介質(zhì)交界面曲直交錯(cuò),各部件材料的磁性能各異,這些特點(diǎn)都給電機(jī)的設(shè)計(jì)帶來(lái)困難,其磁場(chǎng)分布嚴(yán)格來(lái)講是三維的,需通過(guò)求解三維場(chǎng)的方法來(lái)精確計(jì)算磁場(chǎng)的分布。本文應(yīng)用大型有限元分析軟件ANSYS的電磁模塊對(duì)軸向磁場(chǎng)永磁發(fā)電機(jī)進(jìn)行三維靜磁場(chǎng)和空載工況分析,從而得到該電機(jī)的磁場(chǎng)分布和空載工況的性能計(jì)算結(jié)果,并對(duì)磁極形狀進(jìn)行優(yōu)化設(shè)計(jì),最終得到正弦度高的空載反電勢(shì)波形。
2 電機(jī)結(jié)構(gòu)和運(yùn)行原理
文中的軸向磁場(chǎng)永磁發(fā)電機(jī)選用由雙轉(zhuǎn)子和單定子組成的中間定子結(jié)構(gòu),如圖1 所示,有文獻(xiàn)稱(chēng)其為T(mén)ORUS-NN 型結(jié)構(gòu)。該結(jié)構(gòu)的磁路形式為兩側(cè)轉(zhuǎn)子的磁鋼是按同極性的順序排列的,即N 極對(duì)N 極,S 極對(duì)S 極。圖1中亦給出了該種磁路形式的磁通路徑的示意圖,磁通由N 極經(jīng)過(guò)氣隙進(jìn)入定子齒部和軛部,在定子軛中沿周向流通,然后經(jīng)同側(cè)S 極返回,磁場(chǎng)關(guān)于定子軸向中間平面對(duì)稱(chēng)。定子繞組環(huán)繞于鐵心上,稱(chēng)為背靠背(back to back)連接的環(huán)行繞組,如圖2 所示。
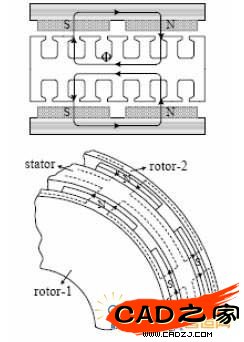
圖 1 TORUS-NN 型軸向磁場(chǎng)電機(jī)

圖2 環(huán)行繞組形式
3 三維電磁場(chǎng)數(shù)值計(jì)算
近年來(lái)得益于計(jì)算機(jī)硬件和軟件的飛速發(fā)展,計(jì)算機(jī)內(nèi)存容量不斷增大,計(jì)算速度不斷提高,軟件功能不斷強(qiáng)大,計(jì)算方法不斷改進(jìn),再加上并行計(jì)算機(jī)的使用,使得我們能解決規(guī)模越來(lái)越大的電磁問(wèn)題,計(jì)算能力有了飛躍的提高。最近國(guó)內(nèi)外對(duì)軸向磁場(chǎng)電機(jī)電磁場(chǎng)的研究逐漸開(kāi)展起來(lái),三維有限元法己經(jīng)被廣泛應(yīng)用到其磁場(chǎng)分析計(jì)算中,這為研制出性能更加優(yōu)越的軸向磁場(chǎng)永磁電機(jī)開(kāi)辟了道路。本文旨在應(yīng)用三維電磁場(chǎng)優(yōu)化設(shè)計(jì)方法得到新的磁極形狀,從而獲得正弦度高的空載氣隙磁密和反電勢(shì)波形,并且進(jìn)行電機(jī)空載工況三維磁場(chǎng)分析。
3.1 軸向磁場(chǎng)永磁同步發(fā)電機(jī)的數(shù)學(xué)模型
對(duì)于永磁電機(jī)的空載工況因求解區(qū)域不存在電流,依據(jù)恒定磁場(chǎng)下的麥克斯韋微分方程組,軸向磁場(chǎng)永磁發(fā)電機(jī)內(nèi)的電磁場(chǎng)可以按照恒定磁場(chǎng)處理,其磁場(chǎng)問(wèn)題的數(shù)學(xué)形式可用如下的標(biāo)量磁位拉普拉斯方程來(lái)描述。
式中, Ω ——電機(jī)的三維求解域;
S1——第一類(lèi)邊界條件,取電機(jī)外一定距離的空間某處的標(biāo)量磁位 等于零;
S2——第二類(lèi)邊界條件,取電機(jī)三維求解區(qū)域中處磁極中性面以外的表面。
ANSYS 軟件中可使用簡(jiǎn)化標(biāo)量勢(shì)法對(duì)上述問(wèn)題進(jìn)行分析求解。簡(jiǎn)化標(biāo)量勢(shì)法(RSP,Reduced Scalar Potential)可以用于沒(méi)有電流存在或者存在電流但沒(méi)有鐵磁材料的區(qū)域,非常適用于電機(jī)空載工況的磁場(chǎng)分析。
3.2 軸向磁場(chǎng)永磁同步發(fā)電機(jī)有限元模型的建立
眾所周知電機(jī)的三維電磁場(chǎng)分析將占用巨大的計(jì)算資源,因而在能夠滿(mǎn)足工程計(jì)算精度的要求下,合理簡(jiǎn)化計(jì)算模型顯得尤為重要。在A(yíng)NSYS 中利用周期對(duì)稱(chēng)邊界條件,為電機(jī)建立一個(gè)磁極范圍的模型,利用軸向?qū)ΨQ(chēng)性將一個(gè)磁極范圍的模型再簡(jiǎn)化為一半,得到電機(jī)八分之一計(jì)算模型,從而大幅減少了計(jì)算量,縮短了計(jì)算時(shí)間和設(shè)計(jì)周期。為準(zhǔn)確模擬磁場(chǎng)在空氣中的衰減,在其徑向邊界外側(cè)建立了空氣模型,包含空氣邊界的實(shí)體模型如圖3所示,定、轉(zhuǎn)子鐵心和磁極的實(shí)體模型如圖4所示,從圖中可以看出該電機(jī)三維模型的復(fù)雜程度。

圖 3 樣機(jī)三維1/8 模型

圖 4 三維1/8 模型網(wǎng)格劃分
電機(jī)設(shè)計(jì)是一個(gè)優(yōu)化設(shè)計(jì)的過(guò)程,需要不斷的調(diào)整設(shè)計(jì)參數(shù),進(jìn)行大量的重復(fù)性計(jì)算得到最終的設(shè)計(jì)方案。APDL(參數(shù)化設(shè)計(jì)語(yǔ)言)是ANSYS 中功能強(qiáng)大二次開(kāi)發(fā)工具,利用它可以完成自動(dòng)化的工作(循環(huán)、分支、宏等結(jié)構(gòu)),可編制出通用性極強(qiáng)的參數(shù)化程序,從而實(shí)現(xiàn)將參數(shù)化智能建模、智能網(wǎng)格剖分、施加載荷、求解和數(shù)據(jù)與圖形后處理的整個(gè)過(guò)程用參數(shù)化程序設(shè)計(jì)自動(dòng)完成,從而可以將設(shè)計(jì)者從繁瑣的重復(fù)性工作中解脫出來(lái)。同時(shí)ANSYS 的開(kāi)放式平臺(tái)為設(shè)計(jì)者的二次開(kāi)發(fā)提供強(qiáng)大的技術(shù)支持,使設(shè)計(jì)者可以根據(jù)自己的需要自由的擴(kuò)展 ANSYS 軟件的功能。
ANSYS 軟件的突出優(yōu)勢(shì)就是允許用戶(hù)對(duì)網(wǎng)格嚴(yán)格掌控,得到高質(zhì)量的有限元網(wǎng)格,從而實(shí)現(xiàn)使用數(shù)量少的有限元單元和節(jié)點(diǎn)完成高精度的計(jì)算,這一點(diǎn)對(duì)于大型三維場(chǎng)計(jì)算非常重要。本文采用映射網(wǎng)格、拉伸和掃掠分網(wǎng)技術(shù),結(jié)合對(duì)模型徑向和軸向網(wǎng)格尺寸的精確控制和拼接技術(shù),得到軸向磁場(chǎng)永磁同步發(fā)電機(jī)八分之一模型的網(wǎng)格如圖5 所示,該網(wǎng)格中幾乎所有單元都是六面體,沒(méi)有退化的三棱柱和四面體單元,從而提高了求解的速度和結(jié)果的精度。

圖 5 樣機(jī)1/8 三維有限元網(wǎng)格模型
本文采用 APDL 語(yǔ)言進(jìn)行二次開(kāi)發(fā),編制了加周期邊界條件的算法、宏命令及調(diào)用宏命令時(shí)外部參數(shù)的傳遞技術(shù),程序可以自動(dòng)完成周期對(duì)稱(chēng)面上節(jié)點(diǎn)位置的判斷,節(jié)點(diǎn)的選擇,自動(dòng)耦合選出的節(jié)點(diǎn)對(duì),大大增加了程序的通用性。該電機(jī)1/8 三維模型施加周期邊界條件的處理如圖6 所示。

圖6 1/8 三維模型周期邊界條件的處理
3.3 三維靜態(tài)磁場(chǎng)分析
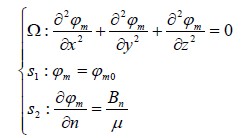
對(duì)上述軸向磁場(chǎng)永磁同步發(fā)電機(jī)八分之一模型施加周期邊界條件后,使用簡(jiǎn)化標(biāo)量勢(shì)法求解得到靜磁場(chǎng)計(jì)算結(jié)果,圖7、8 和9 分別為該電機(jī)定子鐵心內(nèi)徑處磁密分布、定子鐵心外徑處磁密分布、(內(nèi)徑、外徑和中徑處)氣隙磁密波形和轉(zhuǎn)子盤(pán)磁密分布。從圖7 和8中可見(jiàn),該電機(jī)定子鐵心磁路的飽和程度和飽和部位不一樣, 充分說(shuō)明了軸向磁場(chǎng)電機(jī)在內(nèi)圓附近是齒飽和而在外圓附近是軛飽和的磁場(chǎng)分布規(guī)律。從圖9 中我們得出軸向磁場(chǎng)永磁電機(jī)氣隙磁密沿徑向是變化的,因而必須用三維電磁場(chǎng)計(jì)算準(zhǔn)確描述其內(nèi)部電磁規(guī)律。從計(jì)算結(jié)果可見(jiàn),我們可以通過(guò)三維電磁場(chǎng)計(jì)算來(lái)準(zhǔn)確獲得空載工況電機(jī)各部件磁密的分布情況,從而可在設(shè)計(jì)階段優(yōu)化各部件的結(jié)構(gòu)尺寸參數(shù),將電機(jī)的磁負(fù)荷取值在合理的范圍內(nèi)。
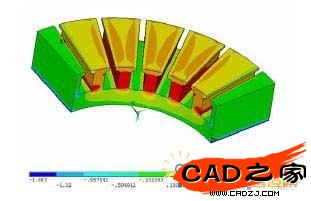
圖 7 定子鐵心內(nèi)徑處磁密分布
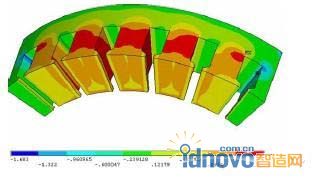
圖8 定子鐵心外徑處磁密分布
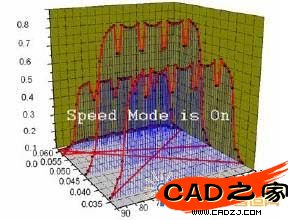
圖 9(內(nèi)徑、外徑和中徑處)氣隙磁密波形
3.4 磁極形狀優(yōu)化設(shè)計(jì)
為得到正弦程度高的空載反電動(dòng)勢(shì)波形,可以采用正弦繞組,也可以對(duì)磁極形狀進(jìn)行優(yōu)化設(shè)計(jì),使電機(jī)空載氣隙磁密呈正弦形。圖10為優(yōu)化前樣機(jī)三維模型,圖11 為其氣隙磁密波形,可見(jiàn)其氣隙磁密近似于平頂波,諧波含量高。ANSYS 軟件中的優(yōu)化方法為我們提供了一系列的分析——評(píng)估——修正的循環(huán)過(guò)程,結(jié)合APDL 語(yǔ)言的參數(shù)化程序從而自動(dòng)完成優(yōu)化設(shè)計(jì),把設(shè)計(jì)者從繁瑣的重復(fù)性工作中解脫出來(lái)。圖5 為樣機(jī)優(yōu)化后的三維模型,采用階梯狀的扇形永磁體,圖12 為優(yōu)化后氣隙磁密波形,從圖中可見(jiàn)氣隙磁場(chǎng)波形已經(jīng)相當(dāng)接近正弦波。將圖中的氣隙磁密波形進(jìn)行了傅立葉分析,可見(jiàn)影響較大的各低次諧波幅值已大大減小,明顯的削弱了低次諧波對(duì)電機(jī)性能的影響。

圖 10 優(yōu)化前樣機(jī)三維模型
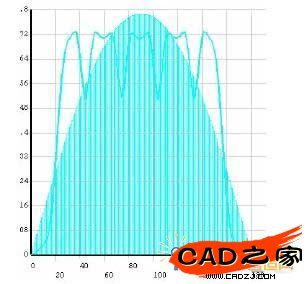
圖11 優(yōu)化前氣隙磁密波形
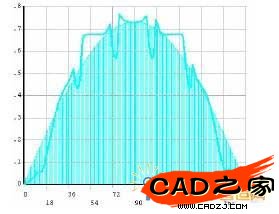
圖 12 優(yōu)化后氣隙磁密波形
3.5 三維空載工況計(jì)算
空載反電勢(shì)是電機(jī)的一個(gè)重要指標(biāo),通過(guò)空載三維電磁場(chǎng)計(jì)算我們可以了解到電機(jī)的磁路設(shè)計(jì)的是否合理,并且得到電機(jī)空載反電勢(shì)波形,它對(duì)電機(jī)的動(dòng)態(tài)、穩(wěn)態(tài)性能均有很大的影響。當(dāng)電機(jī)轉(zhuǎn)子旋轉(zhuǎn)時(shí),永磁磁極產(chǎn)生的磁場(chǎng)是旋轉(zhuǎn)的,與線(xiàn)圈匝鏈的磁鏈隨轉(zhuǎn)子旋轉(zhuǎn)的位置而變化,從而在線(xiàn)圈中產(chǎn)生感應(yīng)電動(dòng)勢(shì),則一匝線(xiàn)圈感應(yīng)電動(dòng)勢(shì)計(jì)算公式為:
式中: θ——轉(zhuǎn)子轉(zhuǎn)過(guò)的機(jī)械角(弧度), ω——轉(zhuǎn)子機(jī)械角速度,φ ——與一匝線(xiàn)圈匝鏈的的磁通,這里取繞組所包圍的鐵心截面中的磁通,建模時(shí)建立一薄層鐵心。
由上述感應(yīng)電動(dòng)勢(shì)計(jì)算公式可知,僅使用靜態(tài)磁場(chǎng)分析無(wú)法計(jì)算出空載反電動(dòng)勢(shì)。當(dāng)電機(jī)為勻速旋轉(zhuǎn)時(shí),將轉(zhuǎn)子每次旋轉(zhuǎn)Δθ 機(jī)械角前后得到的磁通相減求出Δφ ,可求出電機(jī)空載電動(dòng)勢(shì)隨轉(zhuǎn)子角的變化曲線(xiàn)。對(duì)該軸向磁場(chǎng)永磁同步發(fā)電機(jī),這種動(dòng)態(tài)磁場(chǎng)分析的計(jì)算方法使得轉(zhuǎn)子每次旋轉(zhuǎn)Δθ 機(jī)械角后,存在一個(gè)軸向平面和兩個(gè)徑向的圓弧面的定、轉(zhuǎn)子運(yùn)動(dòng)氣隙邊界,對(duì)運(yùn)動(dòng)氣隙邊界要進(jìn)行節(jié)點(diǎn)自由度耦合處理。可見(jiàn)該電機(jī)的運(yùn)動(dòng)氣隙邊界比普通徑向式結(jié)構(gòu)大為復(fù)雜,而且對(duì)平面和圓弧面的運(yùn)動(dòng)氣隙邊界,節(jié)點(diǎn)自由度耦合時(shí)涉及的節(jié)點(diǎn)數(shù)量巨大,處理數(shù)據(jù)量也非常大,這里運(yùn)用轉(zhuǎn)子運(yùn)動(dòng)邊界虛節(jié)點(diǎn)法,并且編制了可直接調(diào)用的宏命令。使用上述方法我們得到空載時(shí)三相相反電勢(shì)波形如圖13 所示。
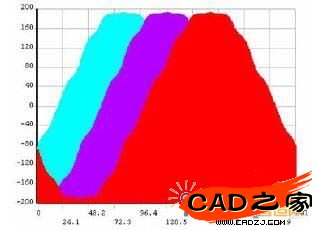
圖13 空載時(shí)三相相反電勢(shì)波形
4 試驗(yàn)
在空載試驗(yàn)中用原動(dòng)機(jī)將樣機(jī)拖動(dòng)到額定轉(zhuǎn)速,用示波器檢測(cè)相反電勢(shì)波形,圖14為試驗(yàn)機(jī)組,圖15 為示波器實(shí)測(cè)的額定轉(zhuǎn)速時(shí)空載工況第一和第四相繞組相反電勢(shì)波形。

圖14 試驗(yàn)機(jī)組
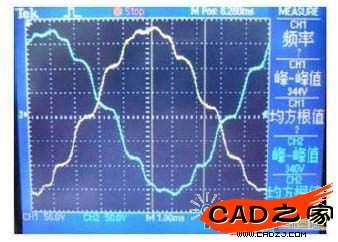
圖 15 實(shí)測(cè)空載反電勢(shì)波形
5 結(jié)論
我們對(duì)樣機(jī)的電磁場(chǎng)仿真計(jì)算結(jié)果和試驗(yàn)結(jié)果進(jìn)行對(duì)比,從圖13 和圖15 中的電磁場(chǎng)計(jì)算和實(shí)測(cè)的空載相反電勢(shì)波形可看出仿真計(jì)算的誤差小于5%,說(shuō)明仿真計(jì)算精度可滿(mǎn)足工程設(shè)計(jì)要求。從空載相反電勢(shì)波形可以看出,該電機(jī)采用磁極形狀修形后,空載相反電勢(shì)波形正弦度較好,同時(shí)說(shuō)明使用上述三維電磁場(chǎng)仿真計(jì)算方法可設(shè)計(jì)出滿(mǎn)足設(shè)計(jì)要求的軸向磁場(chǎng)電機(jī)。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書(shū)Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專(zhuān)業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書(shū) AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF