隨著中國汽車行業的快速發展,各汽車廠為了盡可能早的搶占市場,對汽車模具的生產周期要求越來越短,精度要求越來越高,這就對模具設計以及制造等各個環節提出了更高的要求.隨著CAD/CAM技術的深入應用,二維設計逐漸顯現出越來越多的劣勢,三維設計也就自然而然的成為國內汽車模具設計人員必須掌握的設計手段。對模型進行運動仿真也就有了依據。
UGNX自帶的機構運動分析模塊MOTION提供機構仿真分析和文檔生成功能,可在UG環境定義機構,包括鉸鏈、連桿、彈簧、阻尼、初始運動條件、添加阻力等,然后直接在UG中進行分析,仿真機構運動。設計人員可以分析反作用力、圖解合成位移、速度、加速度曲線,反作用力可輸入有限元分析。
采用UGNX自帶的機構運動分析模塊MOTION提供機構的仿真分析功能可以極其方便的對設計方案進行模擬、驗證、修改、優化,徹底改變傳統機械設計方案需要組織研究團隊進行復雜設計計算,制造物理機驗證結果的冗長過程,縮短生產周期,節約設計成本。一旦熟練的掌握了此方法,就可以在極短的時間內給出完整且極具說服力的設計方案。
接下來本文將結合模具實例介紹三維實體模具實現運動仿真的簡單過程。圖1是一套拉延模具的三維示意圖。
第一步:數據準備階段
在進行運動仿真模擬之前我們需要對已經設計好的三維模具進行簡單的數據整理:由于模具設計工程師大都習慣按照最終工作狀態來開展設計,然而進行運動仿真時我們一般都習慣于從非工作狀態開始進行。這步操作很簡單:假設這套模具在非工作狀態所有的上模內容需要沿著Z軸正方向移動1000mm,壓邊圈組件的工作行程是120mm(需要沿著Z軸正方向移動120mm)。那么我們按著要求移動相關實體模型到指定位置即可。移動前后效果見圖1和圖2。

圖1 模具工作狀態

圖2 模具非工作狀態(打開狀態)
第二步:進入運動仿真模塊
數據準備完成以后我們首先要進入運動仿真模塊才能進行相關操作。按照圖3依次選擇:起點----Motion Simulation即可。
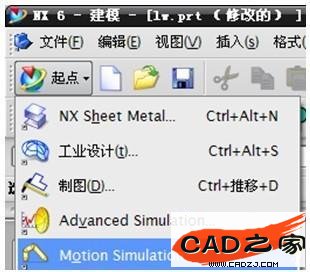
圖3 進入運動仿真模塊操作界面
第三步:設置連桿機構
新建一個仿真:右擊運動導航器(Motion Navigator)上裝配文件名,選擇New Simulation.在隨后出現的對話框中直接選擇確定。(如圖4所示)

圖4 新建仿真操作界面
接下來用鼠標右擊Motion1,選擇新連桿(如圖5所示)。在接下來彈出的對話框中的名稱欄位輸入xmzj,同時將“固定連桿”選項前方框中打上對號(如圖6所示),選中圖7所示的所有三維實體后點擊確定。(此部操作目的是將下模組件中的所有三維實體設置成1個相對地固定的連桿機構)

圖5 新建連桿操作界面1

圖6 新建連桿操作界面2
用同樣的方法將圖8所示的所有三維實體設置成名稱為smzj的連桿機構,不過值得注意的是需要確認“固定連桿”選項前方框中不可以打上對號。
用同樣的方法將圖9所示的所有三維實體設置成名稱為ybqzj的連桿機構,需要確認“固定連桿”選項前方框中不可以打上對號。
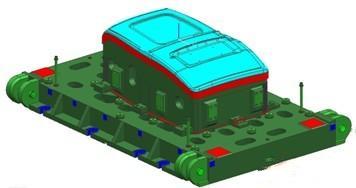
圖7 xmzj連桿機構所包含的三維實體示意圖

圖8 smzj所包含的三維實體示意圖

圖9 ybqzj所包含的三維實體示意圖
截止現在所有的連桿機構已經設置完成。
第四步:設置運動副
按照如圖10所示用鼠標右擊Joints,然后依次選擇:新建…滑動副,在隨后彈出的對話框中(如圖11所示)的“名稱”欄位輸入“xmzj-yundong”,將方位設置成“-Z”方向,同時需要選中前面設置好的“xmzj” 連桿機構。然后需要在“駕駛員”選項卡的下拉菜單中選中“關節運動”。
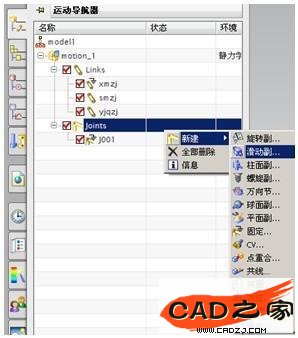
圖10 新建運動副引導頁面

圖11 新建運動副操作界面
同樣按照如圖10所示用鼠標右擊Joints,然后依次選擇:新建…滑動副,在隨后彈出的對話框中(如圖11所示)的“名稱”欄位輸入“ybqzj-yundong”,將方位設置成“-Z”方向,同時需要選中前面設置好的“ybqzj” 連桿機構。然后需要在“駕駛員”選項卡的下拉菜單中選中“關節運動”。
截止現在所有的運動副已經設置完成。
第五步:建立解決方案
按照如圖12所示用鼠標右擊Motion1,然后依次選擇:新建解決方案,將隨后彈出的“解決方案”對話框中的“解決方案類型”設置為“關節運動”(如圖13所示)。
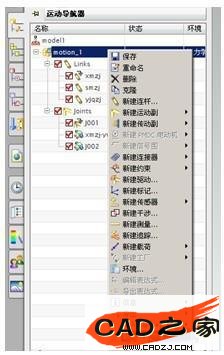
圖12 新建運動副引導頁面
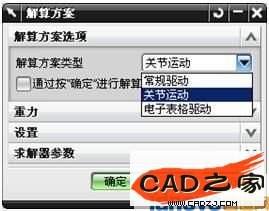
圖13 smzj所包含的三維實體示意圖
第六步:對已經設置好的仿真求解
在主菜單依次選擇分析…Motion…解算,在隨后彈出的對話框中按照圖14進行設置,設置完成以后點擊“單步前進按鈕”,接著按照圖15進行設置,設置完成以后點擊“取消”退出“關節運動”對話框。
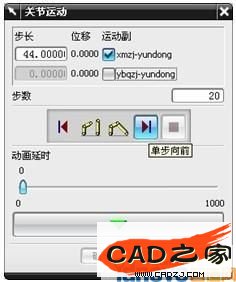
圖14 “關節運動”對話框1
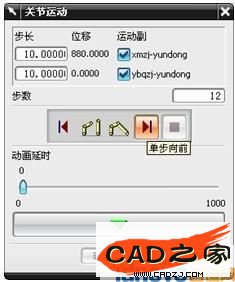
圖15 “關節運動”對話框2
第七步:享受設置取得的成果
在主菜單依次選擇分析…Motion…動畫,在隨后彈出的對話框中點擊“播放”按鈕即可享受一場從未見過的視覺盛宴。同時我們還可以在畫面中動態測量某兩個點的距離變化;查看運動過程中的干涉情況;可以設置成運動過程中如果遇到干涉情況停止運動;可以求出某些關鍵點的運動軌跡等。(如圖16所示)

圖16 “動畫”對話框