0 引言
虛擬現(xiàn)實(shí)技術(shù)(Visual Reality Technology,VRT)是虛擬制造的核心技術(shù)之一,有效地改善了人與計(jì)算機(jī)交互方式,可以逼真地模擬人在自然環(huán)境中的視覺(jué)、聽(tīng)覺(jué)、運(yùn)動(dòng)等行為,它具有實(shí)時(shí)的三維窄間表現(xiàn)能力,提供了人機(jī)交互的操作環(huán)境,從而產(chǎn)生一種身臨其境的感受。隨著互聯(lián)網(wǎng)的飛速發(fā)展,虛擬現(xiàn)實(shí)技術(shù)正逐漸成為一個(gè)研究和應(yīng)用的熱點(diǎn)。機(jī)械產(chǎn)品3D交互系統(tǒng)是虛擬現(xiàn)實(shí)技術(shù)在制造業(yè)中的一項(xiàng)重要應(yīng)用,借助VRT,在設(shè)計(jì)階段就對(duì)產(chǎn)品進(jìn)行虛擬裝配,可克服和避免傳統(tǒng)裝配技術(shù)的缺陷。當(dāng)前工程界在很大程度上還是依賴于二維圖形進(jìn)行技術(shù)交流,大大限制了對(duì)機(jī)器性能和工作特點(diǎn)的了解。
VRML(Virtual Reality Modeling Language,虛擬現(xiàn)實(shí)建模語(yǔ)言)是目前在Internet上比較成熟的3D建模語(yǔ)言,它能夠方便創(chuàng)建與用戶進(jìn)行實(shí)時(shí)交互的3D虛擬環(huán)境,為人們提供最為直觀形象的技術(shù)資料,通過(guò)交互系統(tǒng)觀察到所感興趣的每一個(gè)細(xì)節(jié),并且其優(yōu)勢(shì)在于可以通過(guò)互聯(lián)網(wǎng)直觀生動(dòng)地快速輻射信息。
本文研究了利用VRML實(shí)現(xiàn)機(jī)械產(chǎn)品虛擬仿真的一些關(guān)鍵技術(shù),并以二自由度并聯(lián)機(jī)構(gòu)為實(shí)例給出一個(gè)交互仿真系統(tǒng)的建立實(shí)現(xiàn)過(guò)程,說(shuō)明借助虛擬現(xiàn)實(shí)技術(shù)可以顯示出直觀的全方位全角度實(shí)體,還可通過(guò)系統(tǒng)進(jìn)行模擬運(yùn)動(dòng)過(guò)程等,從而達(dá)到提高課堂學(xué)習(xí)興趣,增強(qiáng)培訓(xùn)效果,促進(jìn)產(chǎn)品的虛擬設(shè)計(jì)裝配,對(duì)機(jī)械產(chǎn)品的設(shè)計(jì)、展示和更新?lián)Q代有著重要的實(shí)際意義。
1 若干關(guān)鍵問(wèn)題及其技術(shù)
1.1 VRML與JAVA
首先需要解決的問(wèn)題是產(chǎn)品3D模型的可視化瀏覽。通常CAD數(shù)據(jù)很難直接以web方式用瀏覽器顯示,目前多采用VRML作為描述產(chǎn)品造型和裝配、虛擬制造過(guò)程的工具.隨著網(wǎng)絡(luò)帶寬和計(jì)算機(jī)硬件性能的不斷提高,作為Web 3D技術(shù)主流的VRML正日益推進(jìn)機(jī)械產(chǎn)品三維Web全景展示交互系統(tǒng)的發(fā)展。VRML是一種用于通過(guò)WorldWideWeb發(fā)布三維模型并允許用戶使用帶有插件的普通瀏覽器對(duì)三維物體進(jìn)行瀏覽的國(guó)際標(biāo)準(zhǔn)。它本身不具備沉浸感,但是由于其易于實(shí)現(xiàn)、適合網(wǎng)絡(luò)傳輸,對(duì)建立基于Web的三維可視化交互式應(yīng)用提供了一種很好的解決方案。
VRML不是一種面向?qū)ο蟮木幊陶Z(yǔ)言,它對(duì)CAD數(shù)據(jù)的描述能力也非常有限,VRML2.0中支持簡(jiǎn)單的行為可用JavaScript來(lái)完成一些基本的數(shù)學(xué)功能和http文件調(diào)用的功能。但對(duì)于一些較為復(fù)雜的工作如場(chǎng)景交互等,鑒于網(wǎng)絡(luò)的跨平臺(tái)和程序語(yǔ)言功能,當(dāng)前Java語(yǔ)言基本上成為了這一應(yīng)用領(lǐng)域的首選。通過(guò)內(nèi)部Script節(jié)點(diǎn)和外部編程接口(EAI)使Java與VRML相結(jié)合,應(yīng)用VRML中的Script節(jié)點(diǎn)從VRML場(chǎng)景內(nèi)部提供了與Java的連接,來(lái)實(shí)現(xiàn)與VRML場(chǎng)景的交互。
1.2 系統(tǒng)結(jié)構(gòu)
可以采用三層Browser/Server結(jié)構(gòu)。虛擬仿真交互系統(tǒng)放置在服務(wù)器端并且完成系列工作如更新升級(jí),客戶端進(jìn)行三維顯示和交互。在該模式下,網(wǎng)絡(luò)帶寬等資源得不到充分運(yùn)用,服務(wù)器端往往成為網(wǎng)絡(luò)的瓶頸;而客戶端帶寬冗余、客戶機(jī)資源也得不到充分利用。
在基于P2P的對(duì)等結(jié)構(gòu)中,每個(gè)節(jié)點(diǎn)的地位都是相同的,具備客戶端和服務(wù)器雙重特性,可以同時(shí)作為服務(wù)使用者和服務(wù)提供者。通過(guò)使用瀏覽器在本地和異地瀏覽模型,團(tuán)隊(duì)成員和用戶叮以時(shí)時(shí)地跟蹤設(shè)計(jì)的進(jìn)度,交互地協(xié)作,以優(yōu)化模型,達(dá)到最佳設(shè)計(jì)目的。兩種模式各有優(yōu)劣,根據(jù)實(shí)際應(yīng)用情況選擇之一或者是二者的結(jié)合嘲。
1.3 CAD數(shù)據(jù)信息提取
VRML在工程上的應(yīng)用主要受限于其模型為了適應(yīng)網(wǎng)絡(luò)傳輸和通用性建模的需要,在精確性和信息量方面與CAD模型相比存在不足。VRML為了提高實(shí)時(shí)交互性能,采用基于多邊形的模型表面描述,即通過(guò)IndexedFaceSet節(jié)點(diǎn)描述面的形狀并通過(guò)面的拼接實(shí)現(xiàn)任意形狀的幾何體外觀,這是與CAD模型的區(qū)別.當(dāng)CAD模型轉(zhuǎn)換為VRML模型之后,容易丟失精確性和特征信息,因此CAD模型數(shù)據(jù)提取直接影響著產(chǎn)品模型仿真及交互系統(tǒng)的逼真度和實(shí)時(shí)性.目前,實(shí)現(xiàn)CAD環(huán)境下的信息提取有以下幾種可能的途徑。
1)直接利用CAD軟件的VRML導(dǎo)出功能;
2)通過(guò)產(chǎn)品模型數(shù)據(jù)轉(zhuǎn)換標(biāo)準(zhǔn)STEP;
3)通過(guò)CAD軟件的API。
目前主流的CAD軟件如UG、ProE都支持VRML格式的輸出,可以很方便的將所設(shè)計(jì)的模型導(dǎo)出(.wrl)格式的文件進(jìn)入VRML裝配環(huán)境,通過(guò)使用瀏覽器在本地和異地瀏覽模型,其缺點(diǎn)在于無(wú)法了解轉(zhuǎn)換細(xì)節(jié),對(duì)仿真模型擴(kuò)充系統(tǒng)功能限制較大,比較適合用來(lái)建立較簡(jiǎn)單的虛擬現(xiàn)實(shí)模型,而后兩種方法可以得到更詳細(xì)的零件信息。對(duì)CAD軟件導(dǎo)出的STEP文件進(jìn)行解析可以得到VRML模型和所需的裝配模型,對(duì)此已作研究。
2 二自由度并聯(lián)機(jī)構(gòu)交互系統(tǒng)的實(shí)現(xiàn)實(shí)例
2.1 結(jié)構(gòu)分析
該并聯(lián)平臺(tái)機(jī)構(gòu)為平面機(jī)構(gòu),由機(jī)架和連桿組成,如圖1所示。機(jī)構(gòu)共有兩條支鏈組成,每個(gè)支鏈為一個(gè)平行四邊形機(jī)構(gòu),由一個(gè)螺旋剮、兩個(gè)定長(zhǎng)桿和4個(gè)轉(zhuǎn)動(dòng)副組成。兩個(gè)螺旋副為機(jī)構(gòu)的兩個(gè)驅(qū)動(dòng)副,當(dāng)機(jī)構(gòu)的兩個(gè)螺旋副作為輸入時(shí),刀具點(diǎn)的f證蹬參數(shù)即會(huì)發(fā)生變化。
考慮到機(jī)構(gòu)可能具有從0到6之間任何數(shù)目的公共約束,由圖1可知該機(jī)構(gòu)總的構(gòu)件數(shù)n=7,運(yùn)動(dòng)副數(shù)g=8,3個(gè)公共約束即λ=3,根據(jù)機(jī)構(gòu)的階數(shù)d=6-λ,得d=3,即本機(jī)構(gòu)為三階機(jī)構(gòu),fi為第i個(gè)運(yùn)動(dòng)副的相對(duì)自由度數(shù),機(jī)構(gòu)的自由度M可表達(dá)如下:
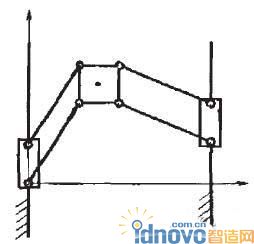
圖1 并聯(lián)機(jī)構(gòu)示意圖
根據(jù)機(jī)構(gòu)的自由度計(jì)算公式(1)可得自由度數(shù)M為2。
2.2 工作流程
UG有全面的零件實(shí)體建模功能,并且可以處理系統(tǒng)級(jí)的裝配設(shè)計(jì),通過(guò)數(shù)據(jù)轉(zhuǎn)換接口就可以將模型轉(zhuǎn)化為所需要的VRML格式。本系統(tǒng)就是利用UG進(jìn)行各零件實(shí)體建模,并使用其裝配功能將并聯(lián)機(jī)構(gòu)平臺(tái)嚴(yán)格裝配,將裝配好的零件分別轉(zhuǎn)化為VRML格式。這樣就可以省去用VRML語(yǔ)言手工編程來(lái)對(duì)零件進(jìn)行裝配.再采用Inline節(jié)點(diǎn)將各個(gè)部分都連到一個(gè)文件中,以實(shí)現(xiàn)整體交互運(yùn)動(dòng)。具體的實(shí)現(xiàn)流程如圖2所示。基于此思路編程代碼量較以往更少,更清晰。
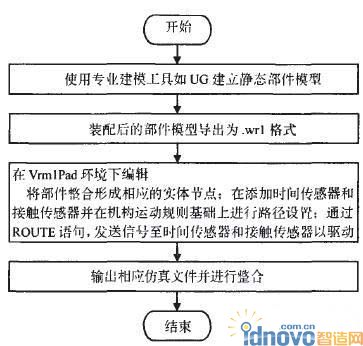
圖2 二自由度并聯(lián)機(jī)構(gòu)仿真實(shí)現(xiàn)流程
2.3 并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)仿真
對(duì)于并聯(lián)機(jī)構(gòu)各部件主要使用了UG中的實(shí)體建模(Solid Modeling)和特征建模(Feature Modeling)兩種方法,圖3是用UG得到的并聯(lián)機(jī)構(gòu)平臺(tái)靜態(tài)模型。建立部件模型如底座、滾珠絲杠、連桿等之后,在UG中把各部件進(jìn)行裝配得到并聯(lián)機(jī)構(gòu)的整體裝配圖。把靜態(tài)模型導(dǎo)出為VRML格式文件在Vrml環(huán)境中實(shí)現(xiàn)運(yùn)動(dòng)仿真。
確定部件之間幾何關(guān)系是解決并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)問(wèn)題的關(guān)鍵。通過(guò)分析計(jì)算并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)方式如平移,斜線,圓周運(yùn)動(dòng)等,建立參數(shù)方程并進(jìn)行整合,然后根據(jù)相應(yīng)的運(yùn)動(dòng)方程編制程序。例如,在連桿運(yùn)動(dòng)方程基礎(chǔ)之上,通過(guò)inline節(jié)點(diǎn)引入構(gòu)件,調(diào)整transform節(jié)點(diǎn)、translation和rotation等字段值來(lái)改變構(gòu)件的位置和方向;各構(gòu)件默認(rèn)旋轉(zhuǎn)中心是構(gòu)件的物理中心,而構(gòu)件實(shí)際旋轉(zhuǎn)中心是其端點(diǎn),所以還需調(diào)整center字段值改變其旋轉(zhuǎn)中心。因連桿隨同刀架做牽連運(yùn)動(dòng),裝配時(shí)把連桿所在節(jié)點(diǎn)嵌套在刀架節(jié)點(diǎn)里,這樣給刀架設(shè)置運(yùn)動(dòng)的同時(shí)也設(shè)定了連桿的牽連轉(zhuǎn)動(dòng),再單獨(dú)設(shè)定連桿繞連桿與刀架交點(diǎn)的轉(zhuǎn)動(dòng),就可通過(guò)設(shè)置兩個(gè)簡(jiǎn)單轉(zhuǎn)動(dòng)確定連桿的復(fù)雜運(yùn)動(dòng)。絲杠螺母的平動(dòng)并不是勻速運(yùn)動(dòng),把其分解為隨同連桿的牽連轉(zhuǎn)動(dòng)和相對(duì)連桿與絲杠螺母交點(diǎn)的轉(zhuǎn)動(dòng)即可使機(jī)構(gòu)協(xié)調(diào)運(yùn)動(dòng)。刀架為勻速圓周運(yùn)動(dòng),利用VRML的TimeSensor節(jié)點(diǎn)和OrientationInterpolator節(jié)點(diǎn)即可實(shí)現(xiàn)。根據(jù)其它構(gòu)件的轉(zhuǎn)角與刀架轉(zhuǎn)角之間的關(guān)系,確定任一時(shí)刻每個(gè)構(gòu)件的轉(zhuǎn)角,從而確定構(gòu)件的運(yùn)動(dòng)位置。圖4所示是運(yùn)動(dòng)中的一種狀態(tài)。
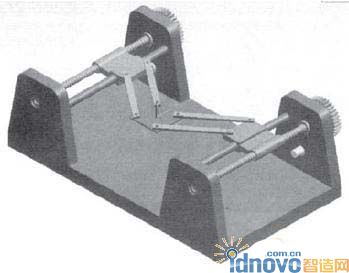
圖3 二自由度并聯(lián)機(jī)構(gòu)平臺(tái)正視圖
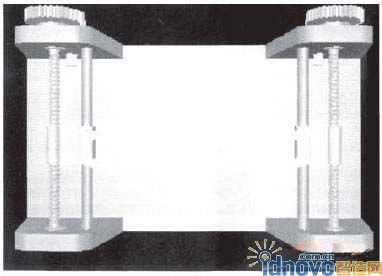
圖4 運(yùn)動(dòng)中的二自由度并聯(lián)機(jī)構(gòu)
3 小結(jié)
基于VRML的交互仿真技術(shù)是一個(gè)在不斷發(fā)展的新課題,由UG生成的VRML場(chǎng)景存在以下問(wèn)題:通過(guò)UG內(nèi)置的模型轉(zhuǎn)換器或其他公司轉(zhuǎn)換器插件輸出的VRML文件包括大量錯(cuò)誤或無(wú)用代碼,且丟失很多UG特效;對(duì)于提高客戶端與服務(wù)器端的交瓦能力等需要作進(jìn)一步的研究。
本文給出了并聯(lián)機(jī)構(gòu)交互仿真實(shí)例達(dá)到了較好的運(yùn)動(dòng)效果,說(shuō)明人們可以在瀏覽器上進(jìn)行多視點(diǎn)、多場(chǎng)景瀏覽對(duì)象,并以多種方式控制場(chǎng)景中物體的運(yùn)動(dòng)與交互,使人感受到逼真的并聯(lián)機(jī)構(gòu)平臺(tái),為基于Internet的異地協(xié)同和設(shè)計(jì)結(jié)果的異地評(píng)價(jià)提供支撐環(huán)境,探索了在虛擬現(xiàn)實(shí)環(huán)境中機(jī)械機(jī)構(gòu)運(yùn)動(dòng)仿真的實(shí)現(xiàn)方法。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF