隨著重型機(jī)器的發(fā)展,常常需要對(duì)大型整體零件和幾何形狀復(fù)雜的工件進(jìn)行加工。傳統(tǒng)的龍門鏜銑床龍門柱固定,載有工件的工作臺(tái)沿導(dǎo)軌縱向進(jìn)給。由于機(jī)床運(yùn)動(dòng)部件重量大,難以獲得高的加速度;同時(shí)因受工作臺(tái)長(zhǎng)度的限制以及節(jié)省工作場(chǎng)所占地面積的要求,龍門柱固定式結(jié)構(gòu)鏜銑床對(duì)于大型工件的高速加工已遠(yuǎn)遠(yuǎn)不能滿足要求。而高速龍門移動(dòng)式鏜銑床,在滿足動(dòng)、靜態(tài)剛度的情況下,讓工作臺(tái)與工件保持靜止,使龍門柱沿導(dǎo)軌縱向進(jìn)給,因?yàn)榱⒅倪\(yùn)動(dòng)質(zhì)量相對(duì)較小,所以可以獲得高的加速度特性。然而,由于橫梁及其相匹配的刀架,龍門及其相匹配的部件等所組成的大型移動(dòng)部件,并不總是形成對(duì)稱結(jié)構(gòu)與對(duì)稱受力,以及運(yùn)行中的各種不確定性擾動(dòng),盡管龍門柱兩邊采用完全相同的傳動(dòng)機(jī)構(gòu),但最終還是不能保證龍門框架兩邊立柱移動(dòng)的一致性,這種不一致性產(chǎn)生的機(jī)械耦合可能使龍門框架驅(qū)動(dòng)部件和被加工工件受到損壞。所以,兩邊立柱的同步傳動(dòng)是這類機(jī)床消除機(jī)械耦合,避免機(jī)械損壞,保證加工精度的關(guān)鍵技術(shù)。
為了解決刀架在橫梁位置變化所引起的立柱兩邊等效慣量的變化破壞輸出的動(dòng)態(tài)同步性能,采用負(fù)載動(dòng)態(tài)補(bǔ)償方法調(diào)整比例增益,使兩電機(jī)保持同步。近年來,智能控制發(fā)展十分迅速,特別是模糊控制不完全依賴對(duì)象的數(shù)學(xué)模型,適于對(duì)具有不確定性的系統(tǒng)和非線性系統(tǒng)進(jìn)行控制,有利于解決許多經(jīng)典控制難以解決的問題。本文引入模糊PID控制器作為速度調(diào)節(jié)器,有效的利用了模糊控制的優(yōu)點(diǎn),從而提高了同步控制精度。
龍門移動(dòng)式鏜銑床的結(jié)構(gòu)及耦合
圖1是雙直線電機(jī)驅(qū)動(dòng)的龍門移動(dòng)式鏜銑床結(jié)構(gòu)示意圖。兩臺(tái)直線電機(jī)分別驅(qū)動(dòng)兩個(gè)立柱,一個(gè)控制回路的輸入通過機(jī)械耦合作用影響另一個(gè)控制回路的輸出,任一單回路的干擾,不僅影響本回路的輸出,也會(huì)通過橫梁影響另一回路的輸出,即干擾互相耦合,兩臺(tái)驅(qū)動(dòng)電機(jī)輸出端存在機(jī)械耦合。
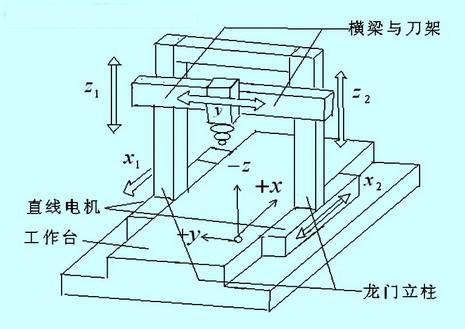
圖1直線電機(jī)驅(qū)動(dòng)的龍門移動(dòng)式鏜銑床結(jié)構(gòu)
直線永磁伺服電機(jī)(LPMSM)數(shù)學(xué)模型
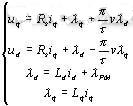
LPMSM的d-q軸模型電壓方程及磁鏈方程為:
 (1)
(1)
式中,Rs為動(dòng)子電阻;ud,uq,id,iq,Ld,Lq,λd,λq分別為d、q軸動(dòng)子電壓、電流、電感和磁鏈;τ為動(dòng)子速度;λp/d為極距;為定子永磁體勵(lì)磁磁鏈。
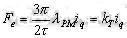
對(duì)LPMSM進(jìn)行矢量控制,使動(dòng)子電流矢量與定子永磁體磁場(chǎng)在空間正交,即使id=0,則:
 (2)
(2)
其中,kT為推力系數(shù)
運(yùn)動(dòng)方程
 (3)
(3)
其中FL為負(fù)載阻力;FE為端部效應(yīng)產(chǎn)生的等效阻力;D為粘滯摩擦系數(shù);m為動(dòng)子及其所帶負(fù)載的質(zhì)量。
系統(tǒng)的控制結(jié)構(gòu)
在龍門移動(dòng)式鏜銑床的同步伺服系統(tǒng)中,兩個(gè)伺服子系統(tǒng)按同一速度給定信號(hào)運(yùn)動(dòng),定義其中一個(gè)伺服系統(tǒng)為主動(dòng)軸,另一個(gè)為從動(dòng)軸,就構(gòu)成了獨(dú)立的主—從驅(qū)動(dòng)方式。通過對(duì)直線電機(jī)進(jìn)行推力控制,使兩軸保持同步。本文采用主從控制結(jié)構(gòu),僅對(duì)主動(dòng)電機(jī)使用位置控制。主動(dòng)電機(jī)的位置控制器輸出當(dāng)作從動(dòng)電機(jī)的速度命令信號(hào),當(dāng)主動(dòng)電機(jī)受到外界干擾產(chǎn)生位置反饋的變化,從動(dòng)電機(jī)的參考速度與主動(dòng)電機(jī)的參考速度一樣也隨之變化,這樣將提高控制系統(tǒng)耦合結(jié)構(gòu)的安全系數(shù)。同步控制系統(tǒng)結(jié)構(gòu)原理圖如圖2所示。其中,P2為位置前饋控制器;P1為位置比例控制器;模糊PID控制器為速度控制器,以實(shí)現(xiàn)對(duì)輸入信號(hào)的快速精確響應(yīng);PI控制器對(duì)動(dòng)態(tài)變形力補(bǔ)償,防止高速運(yùn)行下,過大的雙軸同步誤差對(duì)系統(tǒng)造成危害。#p#分頁(yè)標(biāo)題#e#
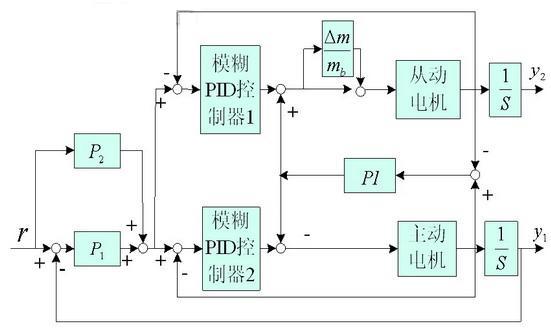
圖2 同步控制系統(tǒng)結(jié)構(gòu)原理圖
負(fù)載動(dòng)態(tài)補(bǔ)償設(shè)計(jì)
當(dāng)龍門移動(dòng)式鏜銑加工中心實(shí)現(xiàn)二維運(yùn)動(dòng)控制時(shí),Y軸直線電機(jī)驅(qū)動(dòng)的刀架位置變化往往會(huì)導(dǎo)致X軸直線電機(jī)等效慣量的改變,其中,從動(dòng)電機(jī)由于不具有獨(dú)立的定位控制,容易受到等效慣量的改變而影響輸出,進(jìn)而影響兩個(gè)X軸的輸出同步。這就要求采用負(fù)載動(dòng)態(tài)補(bǔ)償?shù)姆椒ǎ{(diào)整比例增益并給X軸從動(dòng)電機(jī)以控制補(bǔ)償,使得系統(tǒng)能夠保持同步運(yùn)行。當(dāng)電機(jī)等效慣量增加的時(shí)候,它的電流輸入與速度輸出之間的傳遞函數(shù)將會(huì)產(chǎn)生變化,即l/△mb->l/(mb+△m)。負(fù)載動(dòng)態(tài)補(bǔ)償?shù)脑碚抢靡粋€(gè)權(quán)重調(diào)整電流輸入與速度輸出間的傳遞函數(shù),使其保持W/mb=W'/(mb+△m)的恒定關(guān)系,則W'=(1+△m/mb)*W。即為負(fù)載動(dòng)態(tài)調(diào)變?cè)鲆妗F渲蠾只是一個(gè)比例值,可定義為1。設(shè)計(jì)W`只需要求得△m即可。如圖3所示,定義長(zhǎng)度e、f、g、h、及諸質(zhì)量重心m1、m2、m3和A、B兩點(diǎn)。利用力矩平衡原理可以計(jì)算出B點(diǎn)承受結(jié)構(gòu)(含m1、m2)等效質(zhì)量△m的大小。
通過負(fù)載動(dòng)態(tài)調(diào)變?cè)鲆娴难a(bǔ)償,即使從動(dòng)電機(jī)等效慣量產(chǎn)生變化,其速度輸出影響也不會(huì)因此受到影響,使系統(tǒng)仍維持良好的同步響應(yīng)。
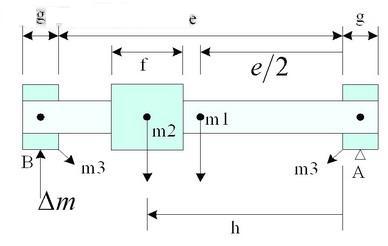
圖3力矩平衡示意圖
模糊PID控制器的設(shè)計(jì)
根據(jù)模糊控制理論設(shè)計(jì)模糊控制器。定義系統(tǒng)誤差|e|和誤差的變化率|ec|作為模糊控制器的輸入量,其中
e=yd-y (4)
ec=△e (5)
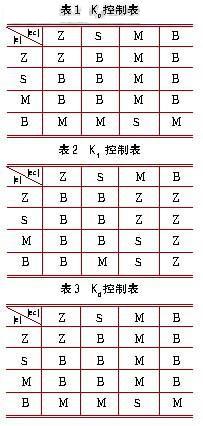
Kp,Ki,Kd為輸出,即此模糊控制器為兩輸入三輸出形式。輸入語言變量 和 的論域均為{-6, -5, -4, -3, -2, -l, 0, l, 2, 3, 4, 5, 6},輸出語言變量Kp,Ki,Kd的論域均為{ 0, l, 2, 3, 4, 5, 6}。通過總結(jié)以往工程實(shí)際操作經(jīng)驗(yàn)得到e、ec的隸屬度函數(shù)和PID參數(shù)Kp,Ki,Kd的控制規(guī)則表。并設(shè)計(jì)出模糊PID控制器。Kp,Ki,Kd的控制規(guī)則如表1-3所示:
系統(tǒng)的仿真
采用兩臺(tái)參數(shù)完全相同的直線電機(jī)進(jìn)行仿真研究,參數(shù)如下:
M=11.0kg
D=2.0N.s/m
KT=27.5N/A
Fe=200N
控制器參數(shù):P1=12、P2=1、PI=0.0583+0.213/S。當(dāng)時(shí)間為0.5s時(shí),在X軸輸入幅值為0.4m的階躍信號(hào)為位置信號(hào)。針對(duì)Y軸負(fù)載重心的變化,本研究以負(fù)載動(dòng)態(tài)補(bǔ)償消除從動(dòng)電機(jī)因?yàn)榈刃T量的變化而造成的影響,并加上模糊PID控制器進(jìn)行調(diào)節(jié)。圖4為無負(fù)載動(dòng)態(tài)補(bǔ)償和模糊PID控制時(shí)系統(tǒng)的位置誤差響應(yīng)曲線,圖5為加入負(fù)載動(dòng)態(tài)補(bǔ)償和模糊PID控制之后的位置誤差響應(yīng)曲線,可以看出模糊PID控制和負(fù)載動(dòng)態(tài)補(bǔ)償?shù)募尤氪蟠筇岣吡藘芍本€電機(jī)的同步精度。
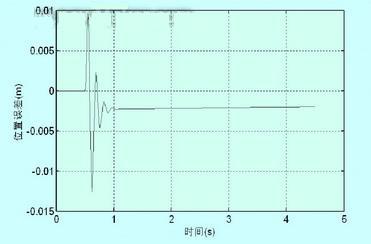
圖4無負(fù)載動(dòng)態(tài)補(bǔ)償和模糊PID控制的位置誤差響應(yīng)曲線
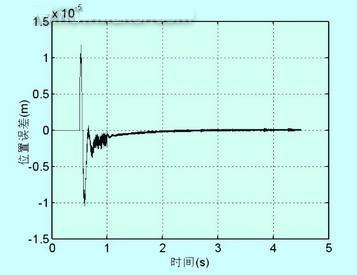
圖5有負(fù)載動(dòng)態(tài)補(bǔ)償和模糊PID控制后位置誤差響應(yīng)曲線
結(jié)語
本文在分析龍門移動(dòng)式鏜銑床中雙直線電機(jī)驅(qū)動(dòng)的X軸上兩直線電機(jī)間不同步的主要原因的基礎(chǔ)上,提出了模糊PID和負(fù)載動(dòng)態(tài)補(bǔ)償?shù)目刂品椒āS煞抡媲€可以看到,模糊PID控制和負(fù)載動(dòng)態(tài)補(bǔ)償?shù)募尤氪蟠筇岣吡藘芍本€電機(jī)的同步精度。#p#分頁(yè)標(biāo)題#e#
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF