裝配作業是制造過程的后置工序,裝配質量對產品的性能有直接的影響,為降低生產成本,提高企業經濟效益和競爭能力,在產品的設計階段,進行產品數字化預裝配是十分必要的。在可視化技術、仿真技術、裝配過程的研究等技術綜合應用的基礎上產生了虛擬裝配技術。虛擬裝配(Virtual Assembly, VA)是虛擬制造的關鍵組成部分,利用計算機工具,通過分析、預測產品模型,對產品進行數據描述和可視化,做出與裝配有關的工程決策,而不需要實物產品模型作支持。據統計,目前國外制造業應用虛擬裝配技術節約了研制經費,并縮短了研制周期,但我國關于虛擬裝配技術的研究起步較晚。
在實際的生產中,任意一個機床都有幾百個甚至上千個零部件,每個零部件的位置和姿態信息需用4X4 的矩陣表達,顯然,這樣龐大的數據量,在程序代碼中直接實現是很困難的,同時,要將機床裝配仿真用于維護培訓和產品演示,就必須向機床方面的專家(非程序員)提供一種簡便、直觀、靈活的手段來設定機床的裝配運動方案。為了實時、方便的修改裝配序列和裝配路徑,并且準確的描述產品在裝配或拆卸過程的位姿信息,本文對虛擬裝配過程提出了一種機床虛擬裝配的描述語言以及與其相對應的虛擬裝配函數。
虛擬裝配函數實現的實質,就是先提取機床虛擬裝配的描述語言中的信息,再將其轉化為機床零部件在每一時間點上的位姿和其它與顯示相關的信息,在此基礎上調用機床場景繪制模塊的相應操作來實時繪制運動場景,實現虛擬裝配的仿真過程。
1 三維空間中物體位姿和運動信息的描述
在三維裝配空間中,裝配元件位姿和運動信息的準確描述是正確模擬產品裝/拆過程的關鍵。采用一個4×4 的位姿矩陣和運動矩陣,可有效描述裝配空間中物體的位姿信息和物體任意運動的信息,從而實現完整的產品裝配過程仿真。
1.1 物體位姿和運動信息的描述
位姿是指位置和姿態,反映了三維裝配空間中裝配件的位置和空間角度,由兩部分組成:一部分是位置信息(Position),描述部件的空間位置;另一部分是姿態信息(Orientation),描述部件的方向。部件的平移是通過部件的空間位置的改變來體現的,部件的旋轉是通過部件方向的改變來體現的。
裝配元件的運動變換分為平移運動變換、旋轉運動變換和復合運動變換。復合運動變換可以簡化為沿某方向平移運動與繞某一軸線旋轉運動的合成。所以待裝配元件從一個關鍵點到另一個關鍵點之間的任何一種運動,均可以表示為平移運動變換和旋轉變換的合成。
在裝配實體模型的三維空間中,裝配元件的位姿信息和運動矩陣均可采用一個4×4的矩陣[T]來表示
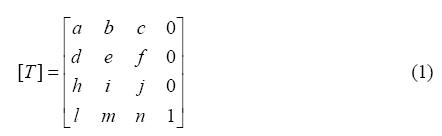
其中,左上角的3×3 矩陣主要用于物體的姿態信息或裝配過程中零部件的旋轉變換;[l m n]矩陣主要用于物體的位置信息或零部件在裝配過程中產生平移變換。
1.2 裝配/拆卸中運動參數的設定
三維空間中,為了簡化計算和減少不必要的數據,對于不同的運動方式,設計不同的元組表示。
對于直線運動方式,采用5 元組法,定義為(object,Xe,Ye,Ze,speed);對于圓弧運動方式,采用9 元組法,定義為(object,Xp,Yp,Zp,Xd,Yd,Zd,speed,theta);對于旋轉運動方式,采用9 元組法,定義為(object,Xp,Yp,Zp,Xd,Yd,Zd,rate,theta);對于定軸心螺旋進給運動方式,采用10 元組法,定義為(object,Xp,Yp,Zp,Xd,Yd,Zd,distance,speed,rate)。#p#分頁標題#e#
其中object 為運動物體的名稱,(Xe,Ye,Ze)為移動到的終點坐標值,(Xp,Yp,Zp)為旋轉軸上任意一點坐標值,(Xd,Yd,Zd)為旋轉軸方向矢量,distance 為起點到終點沿軸線方向進給的距離,speed 為移動速度參數,theta 為角度參數,rate 為角速度參數。
要實現虛擬環境中的裝配仿真,還應該建立虛擬環境和虛擬機床,因此,設計并實現了添加零部件(包括位姿和顏色信息)的代碼以及對虛擬環境進行特效處理(添加聲音、燈光、紋理、動態顯示裝配零部件的信息)的代碼。
1.3 物體三維變換方式的設定及其實現
因為,任何復雜的運動變換可以簡化為沿某方向平移運動與繞某一軸線旋轉運動的合成,為了形象的描述仿真過程,我們設計出如下幾種運動方式:
(1)直線移動方式
根據已知條件計算出物體在移動過程中的任意時刻t 的坐標,只考慮平移部分。
(2)旋轉運動方式
為通用起見,本文把旋轉軸設為任意軸,任意軸的旋轉變換,我們采用組合變換。
根據圖形變換的知識,計算出變換矩陣。
(3)圓弧運動方式
算法同旋轉運動方式,但是我們只需要考慮矩陣[T]的T[3][0]、T[3][1]、T[3][2]三個
參數即可。
(4)螺旋進給運動方式
可以把整個運動過程分解成兩個過程:一個過程是:不考慮沿中心軸方向的進給運動,只考慮旋轉運動,其變換矩陣同(圓弧運動);另外一個過程是:只考慮沿中心軸方向的進給運動,而不考慮旋轉運動,也就是只有平移變換運動。則整個運動的變換矩陣為旋轉運動的矩陣和平移變換矩陣的乘積。
2 裝配仿真的實現過程以及實例演示
車床裝配仿真就是通過實時顯示車床各個零部件的運動,從而演示車床的裝配過程。實現車床裝配仿真的基本思路,是計算機床每個裝配元件在每個時間點上的位置和姿態信息,然后根據這些信息按一定的時間間隔,不斷地重新繪制機床場景圖。
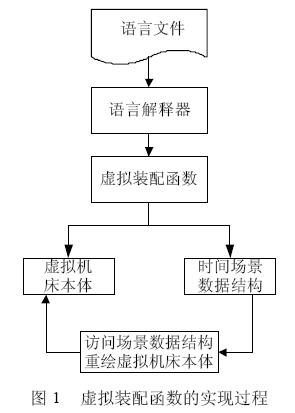
機床裝配仿真的描述語言到仿真的實現過程包括以下幾個步驟:語言解釋器調用并解釋描述語言文件,提取有用的參數,根據得到的參數,調用與其相對應的虛擬裝配函數;執行虛擬裝配函數來生成虛擬機床的本體和記錄機床裝配運動信息的中間數據結構;通過對這種中間數據結構的訪問,從而實現虛擬機床的裝配或拆卸過程(其實現過程見圖1 所示)。
在時間場景數據結構中,保存每個時間點上發生了變化的機床零部件以及零部件的狀態(位置、姿態和顯示屬性)信息 (圖2 是“更新-時間”數據結構的示意圖),虛擬裝配函數負責將連續的運動插補成離散的時間點上的精確值,并根據這些值生成更新-時間數據結構上的相應節點。

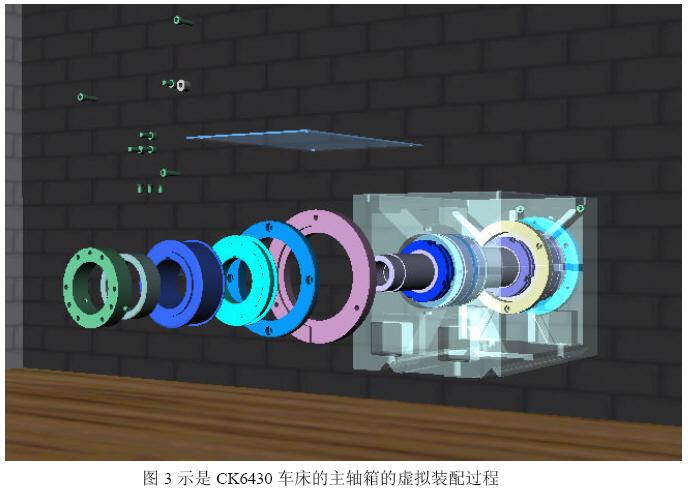
機床裝配仿真模塊提供了相應的操作來訪問“更新-時間”數據結構。根據“更新-時間”數據結構重繪場景,實現裝配仿真。(圖3 示是CK6430 車床的主軸箱的虛擬裝配過程)
具體的實現過程是:
根據指定的起始時間找到相應的時間節點
while 時間節點!=NULL
while 更新信息節點!=NULL#p#分頁標題#e#
if 零部件的位姿被更新
調用機床場景繪制模塊的Set_Transformation 操作;
if 零部件的透明度屬性被更新
調用機床場景繪制模塊的Set_Transparency 操作;
if 零部件的紋理屬性被更新
調用機床場景繪制模塊的Set_Texture 操作;
…………………………
3 結束語
本文對虛擬裝配的過程提出并實現了一種機床裝配仿真的描述語言以及與其相對應的虛擬裝配函數,通過裝配過程的仿真實現虛擬產品的預裝配,驗證和改進產品的裝配工藝,對裝配工藝和裝配路徑進行優化,生動直觀地展示產品的可裝配性,可以用作實施VM 的支持工具之一。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF