1.建立四桿機構所需構件
1.1新建文件
啟動Pro/E,新建文件:選“零件”/“實體”,文件名默認。
我們可以使用兩次拉伸的方法建立四桿機構的第一個構件——機架。見草繪圖(圖一)。

圖1
1.2生成機架實體
底板拉伸深度10,圓柱銷拉伸深度12。如(圖二)。選擇“文件”/“保存副本”,輸入新文件名“sg0 1.Prt”。

圖2
1.3生成其余構件實體
為提高效率,可在上述實體的基礎上,再次進行編輯修改,完成后選擇“文件”/“保存副本”,輸入新文件名“sg02.prt”,繼續進行編輯修改,完成后“保存副本”,表1為各文件名。
表1

機構類型判定:最長+最短(180+70=250)≤其余兩桿長度之和(150+130=280),且最短桿為連架桿。機構類型為曲柄搖桿機構。
2.構件組裝
構件組裝在Pro/E中完成,即利用其“組件/設計”模塊。
2.1新建裝配文件
執行“文件”/“新建”,選“組件”/“設計”,輸入文件名“sgjk.asm”,進入實體裝配環境。
2.2裝配機架
Pro/E中的裝配類型分為約束和連接,約束類型相對兩零件只能為固定狀態,而連接可以是活動狀態,且組裝完成后要為完全約束或完全連接定義狀態。
執行“插入”/“元件”/“裝配”,打開機架文件sg01.prt,約束類型為“缺省”。
2.3裝配曲柄
執行“插入”/“元件”/“裝配”,打開曲柄文件sg02.prt,連接類型為“銷釘”(圖三),即((機械基礎》教材所指的鉸鏈連接,運動副為低副中的轉動副。放置方式為軸與軸對齊,面與面對齊,并分別選擇兩構件幾何特征,操控板顯示“完全連接定義”狀態。圖四為完成曲柄裝配后的效果圖。Ctrl+Alt+鼠標拖動曲柄,可以動態觀察曲柄繞機架圓柱銷轉動情況。

圖3

圖4
2.4裝配搖桿
搖桿和曲柄均為連架桿,搖桿文件為sg04.prt,方法同曲柄的裝配方法。
2.5裝配連桿
執行“插入”/“元件”/“裝配”,打開連桿文件sg03.prt,首先與曲柄連接,連接類型為“銷釘”,單擊操控板“放置”/“新設置”,增加與搖桿的連接,并進行相關幾何特征選取。完成后如圖五,Ctrl+Alt+鼠標拖動曲柄,可以動態觀察曲柄帶動連桿、搖桿運動,而且,曲柄只可轉動,搖桿只可擺動。

圖5
3.運動仿真
3.1基本原理
Pro/ENGINEER作為CAD/CAM/CAE系統集成軟件,為用戶提供了全方位的產品開發功能,集零件設計、產品組裝、機構設計與分析、模具設計與數控加工、工程圖繪制等功能于一體,可為用戶構成十分便捷、功能強大的設計及分析工作平臺,解決大量原本看來可能較為棘手的工程問題。機械工程中較為常見的機構可充分利用Pro/ENGINEER的產品組裝及機構仿真與分析功能,進行機構設計、仿真及動態分析。
3.2運動仿真基本步驟
3.2.1進入運動仿真環境。執行“應用程序”/“機構”,進入機構運動仿真環境,窗口左側出現運動仿真特征樹,右側顯示運動分析工具欄。
3.2.2設置主動件。單擊工具按鈕“伺服電機”,在彈出的窗口中圖六,選擇曲柄與機架的鉸接軸作為運動軸,即指定曲柄為主動件,來產生回轉運動。選定后效果如圖七。
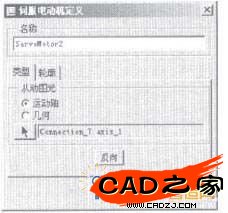
圖6
圖7
切換到“輪廓”選項卡(圖八),選“速度”,A處輸入“20”,數值越大,運動速度越快。
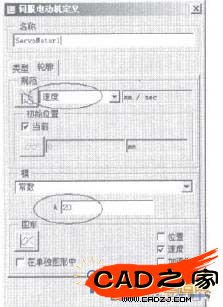
圖8
3.2.3運動仿真設置。單擊工具按鈕“機構分析”,在彈出的窗口中,按圖九進行設置,單擊“運行”,可以看到四桿機構開始動作,曲柄作整周回轉,搖桿左右擺動。30秒后結束,其運行結果將自動保存下來。
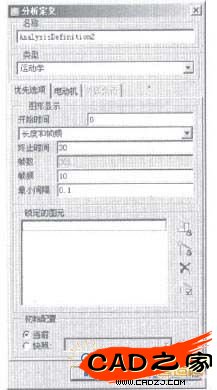
圖9
3.2.4運動仿真回放及輸出。單擊工具按鈕“回放”,用播放控制按鈕對運動仿真進行回放。單擊“捕獲”,在彈出的窗口中(圖十),可以將動畫輸出為.mpeg和.avi視頻等格式。
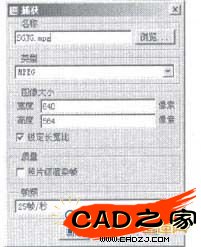
圖10
4.運動分析
4.1生成搖桿速度與時間關系的運動分析圖
單擊工具按鈕“生成分析”,在圖十一中,單擊新建按鈕,彈出(圖十二)“測量定義”對話框,指定搖桿和連桿的連接軸為分析對象,進行(圖十二)設置,按確定。在圖十一中,單擊按鈕,將生成(圖十三)的結果,橫坐標表示時間,縱坐標表示速度。可見,在不同的時間點,搖桿的速度是不同的。曲線位置低的,運動速度慢,是四桿機構的工作行程,高的部分則是返回行程,急回特性效果明顯。同理,也可生成搖桿的加速度與曲柄轉動時間的關系圖。

圖11
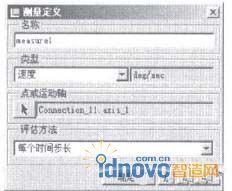
圖12

圖13
4.2其它運動分析
(1)死點位置分析,以搖桿作為主動件,可以發現連桿與曲柄共線時,運動不確定或無法運動,這是機構的死點位置;
(2)急回特性觀察,動畫演示中,返回行程要明顯快過工作行程;
(3)全局干涉,檢測機構在運動中,實體之間相互是否產生運動干涉;
(4)運動軌跡線描繪和構件包絡描繪;
(5)機構類型判定,改變各桿件長度,重新裝配,得到的運動規律一定符合各機構類型的固有規律,有力地檢驗了桿長條件和最短桿條件的四桿機構類型判定理論。
5.結束語
Pro/E的CAE功能異常強大,在《機械基礎》、《模具設計基礎》等專業課程教學中,將平面的、靜止的研究對象(如凸輪機構、齒輪傳動、沖壓模工作過程等),清晰、生動、形象地展示在我們面前,難點也變得容易理解。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF