用Adams等軟件對汽車進行運動仿真研究是目前汽車機構設計分析的主要手段之一,但是,這類仿真軟件學習難度較大,建立的仿真模型與工程制圖脫節,不能直接應用到其他三維造型設計中,因此,在SolidWorks,UG,Pro/E等主流三維軟件使用者中,采用專門仿真軟件進行分析的不多.在目前市場上所見到的三維CAD解決方案中,SolidWorks是世界銷售套數最多的3D軟件。COSMOSMotion是以Adams為內核,用菜單形式內嵌到SolidWorks中,與SolidWorks無縫集成的功能強大的三維運動與動力學仿真插件。用SolidWorks進行零件三維造型和裝配后,進人COSMOSMotion,添加約束、驅動力、工作阻力等,建立仿真模型,就可以對機器進行運動和動力學分析舊J,為產品的創新設計、縮短設計周期提供了一種切實有效的手段和方法。
本文中通過SolidWorks建立汽車轉向和行駛三維模型,采用COSMOSMotion對其進行仿真模擬。為了使問題簡化,本文中對汽車結構進行了較大簡化。
1 轉向機構
汽車機械轉向系由轉向操縱機構、轉向器和轉向傳動機構三大部分組成。根據轉向器位置和轉向輪懸架類型的不同,轉向傳動機構的組成和布置分為與非獨立懸架配用的轉向傳動機構和與獨立懸架配用的轉向傳動機構。本文中討論與非獨立懸架配用的轉向傳動機構。轉向傳動機構是將轉向器輸出的力和運動傳給轉向橋兩側的轉向節,使兩側轉向輪偏轉,并使兩轉向輪偏轉按一定的關系變化,以保證汽車轉向時車輪與地面的相對滑動盡可能小。
為了避免汽車轉向時產生的附加阻力過大和輪胎磨損太快,要求轉向系在汽車轉向時,所有車輪均做純滾動而不產生側向滑移,圖l中兩側車輪偏轉角α和β的理想關系為
![]()
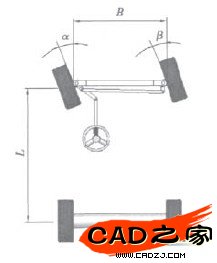
圖1 轉向機構
因此轉向傳動機構轉向梯形的幾何參數需要優化,但是,至今所有的汽車的轉向梯形都只能設計在一定的車輪偏轉角范圍內,接近于理想關系。
為了模擬的方便,轉向機構簡化為圖2所示,其中:1為左(右)梯形臂;2為方向盤;3為轉向直拉桿;4為轉向節臂;5為轉向橫拉桿;6為機架;7為車輪。左(右)梯形臂、轉向橫拉桿、機架組成等腰梯形機構。
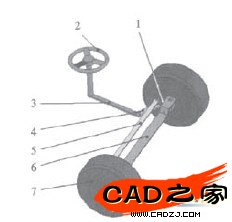
圖2 轉向機構模型
2 轉向仿真
2.1主要運動副設置
采用SolidWorks建立轉向機構模型,進入COSMOSMotion進行仿真設置,將機架設置為靜止零部件,在方向盤2和機架6之間添加旋轉副Joint;在轉向直拉桿3和機架6之間添加移動副Joint:2.,然后在Joint和Joint2之間添加一個耦合,使得方向盤的轉動與轉向直拉桿的移動按照一定的比例運動。移動副Joint2的移動距離根據不同的初始安裝情況,其值可以不同,若太大則不能達到運動范圍,仿真時將報錯。
2.2方向盤轉動函數設置
為方向盤2和機架6之間旋轉副Joint設置一個轉動函數,來控制方向盤的運動,轉動函數用COSMOSMotion的表達式設置,采用4個step函數相加:
step(TIME,0,0D,2,0D)+step(TIME,2,0D,4,-120D)+step(TIME,6,0D,8,240D)+step(TIME,10,0D,12,-120D)
其中D表示度,若不加D,則為弧度。step函數格式:step(x,x0,h0,x1,h1),生成區間(x0,h0)至(x1,h1)的階梯曲線,互為自變量,可以是時間函數。2個step函數相加,第2個step函數的Y值是相對第1個step的增加值,不足絕對值。
2.3轉向仿真分析
仿真時間設置為15S,運行仿真,方向盤實現以下運動(上述4個step函數相加):0~2 S,靜止,如圖3(a);2~4 S,方向盤順時針轉動120°,如圖3(b);4~6 s,靜止;6~8 S,方向盤逆時針轉動240°,如圖3(e);8~10 S,靜止;10~12 S,方向盤順時針轉動120°,如圖3(d);12~15 s,靜止。仿真時間設置為15 S。所以12 S以后方向盤一直維持最后位置狀態,直到仿真結束。
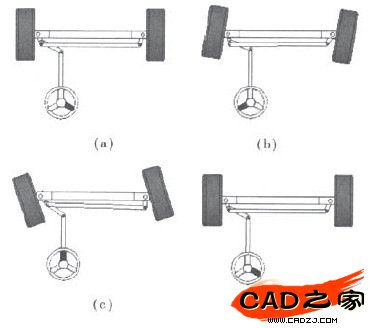
圖3 轉向示意圖
選擇左梯形臂和機架的頂點和轉動中心,生成一個角位移,左車輪在方向盤轉動過程中的轉動角度變化如圖4所示。同樣,右車輪在方向盤轉動過程中的轉動角度變化如圖5所示。可見,在車輪逆時針轉動過程中,左車輪在0~19.4°轉動,右車輪卻在O~17.0°轉動,順時針轉動過程中的范圍也不相同。
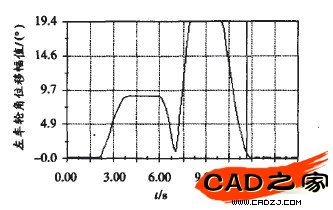
圖4 左車輪轉向
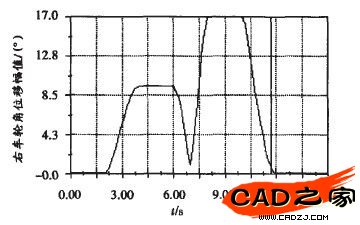
圖5 右車輪轉向
3 行駛仿真
汽車行駛模擬模型由車身、前輪轉向機構、后輪驅動機構、地面組成,通過給車輪和路面之間建立三維碰撞關系,沒置車輪與地面的摩擦,后輪轉動,摩擦力使得汽車行駛。
將地面設置為靜止零部件,其余設置為運動零部件,在后輪的旋轉副添加一個運動,設置2后輪為驅動輪。行駛設置的要點是將4個車輪和地面之問設置為3D碰撞關系。碰撞具體參數設置為:碰撞剛度100000 N/mm;非線性剛度力指數2.2,接觸邊界的最大阻尼系數10 N-sec/mm;碰撞時接觸邊界的穿透深度0.1 mm。為使車輪與地面相對運動。必須設置車輪與地面的摩擦因數:靜摩擦臨界速度取0.1 mm/s,靜摩擦因數O.4;動摩擦臨界速度町以取10 mm/s,動摩擦因數取0.3。
由于3D碰撞的存在,行駛模擬需要較多的計算時間。仿真時間仍然沒置為15 s,仿真計算完成后,選擇軌跡跟蹤,生成的輪零件中心的運行軌跡,可以觀察前輪行駛過程走過的路徑。
下面是運行過程的幾個片段,圖6(a)是行駛開始位置,圖6(b)是運行到4.2 S時的狀況,圖6(C)是運行到6.3 S時的狀況,圖6(d)是運行到7.1 s時的狀況。這些圖像很好地顯示出了汽車直線運行、轉向運行以及沖出路面掉下去的全過程。
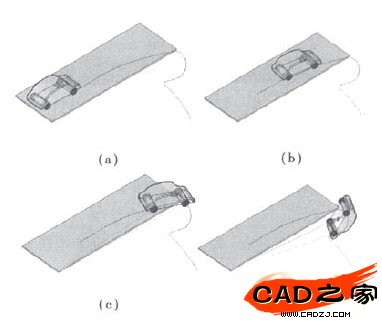
圖6車輛行駛狀況
4 結束語
采用SolidWorks及插件COSMOSMotion實現汽車機構三維實體造型、運動仿真無縫連接。建立了汽車轉向模型,模擬汽車轉向的工作過程。通過給汽車方向盤加上分段的轉向函數,經過梯形機構轉化為前輪的轉動,可用于汽車轉向模擬和轉向梯形機構轉向性能的研究。建立了汽車行駛模型,模擬了汽車在給定驅動和轉向關系時的行駛過程,通過給輪胎和地面添加三維碰撞接觸和摩擦,實現車輪滾動帶動汽車行駛,顯示行駛軌跡,觀察車輛的運行狀況。進一步,還可以通過仿真模型,觀察汽車的運行路徑,設置不同的轉向函數,以便避開障礙物。還可以進一步建立不同的路面模型,觀察車身的碰撞振動情況等,如果結合計算機編制程序二次開發,可以得到更多的研究結果。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF