棘輪機構(gòu)是含有棘輪和棘爪的步進運動機構(gòu),一般用于傳遞平行軸的運動。在機械中一般應(yīng)用在轉(zhuǎn)速不高和要求間歇轉(zhuǎn)動的裝置中,如牛頭刨床的橫向進給機構(gòu)、自行車后軸的齒式棘輪超越機構(gòu)、防逆轉(zhuǎn)棘輪機構(gòu)等等.SOLIDWORKS是優(yōu)秀的CAD的軟件之一,它可以精確地建立各種復(fù)雜的實際仿真模型,COSMOSMOTION是其CAE的應(yīng)用插件,它可進行機構(gòu)的干涉分析,跟蹤零件的運動軌跡,分析機構(gòu)中零件的速度、加速度、作用力、反作用力和力矩等,并以動畫、圖形、表格等多種形式表示其結(jié)果,以此可指導(dǎo)修改零件的結(jié)構(gòu)設(shè)計或調(diào)整零件使用的材料。
1 SOLIDWORKS軟件在棘輪機構(gòu)中的應(yīng)用
下面以實例來說明其分析過程.
1)打開SOLIDWORKS2007,并且將工具中的插件COSMOSMO"I"ION2007勾選.
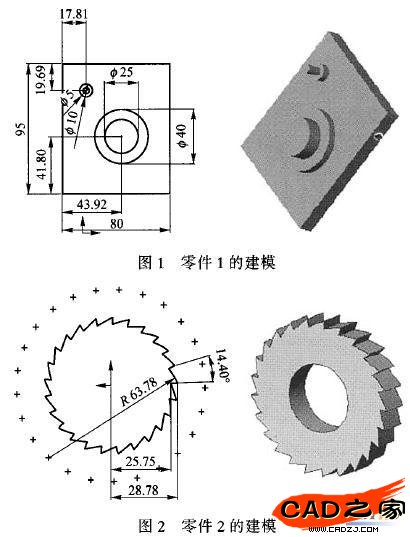
2)新建零件1地板,在基準面中新建草圖1,并給予拉伸1、拉伸2、拉伸3、拉伸4特征,三維模型如圖1.
3)新建零件2棘輪,在基準面中新建草圖,并給予拉伸1、切除一拉伸2二維模型如圖2.
4)新建零件3棘爪,在基準面中新建草圖,并給予拉伸特征,三維模型如圖3.
5)新建裝配體,導(dǎo)人剛才的3個零件.井添加關(guān)系,3個重合和2個同軸心關(guān)系,如圖4.
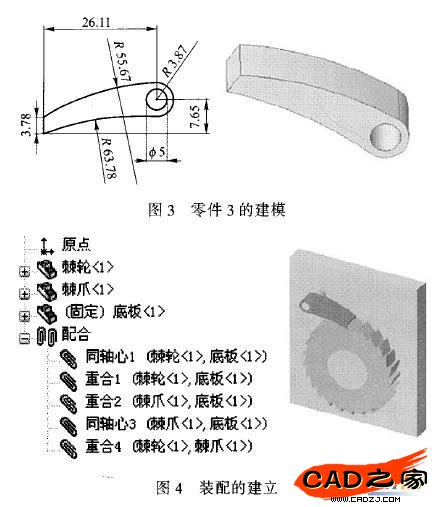
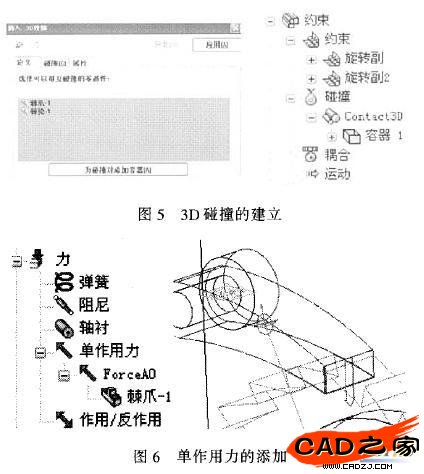
6)打開MOTION菜單,將地板設(shè)為靜止零部件,將棘輪和棘爪設(shè)為運動零部件,這時COSMOSMOTION會自動將SOLIDWORKS裝配樹映射到COSMOSMOTION約束中去.并且右擊約束中的重合,將之刪除,右擊約束添加3D碰撞,選擇棘爪和棘輪,點擊應(yīng)用并關(guān)閉.如圖5
7)單擊力中的單作用力,添加單作用力.選擇棘爪,并定義受力部位、參考部件、位置及方向,并應(yīng)用.給棘爪添加一個向下的力,如圖6.
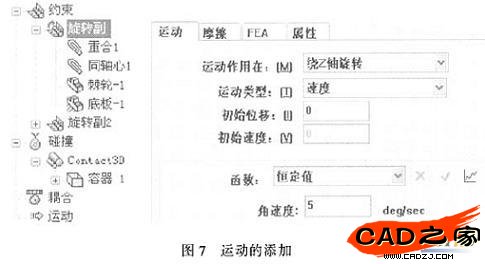
8)右擊旋轉(zhuǎn)副,選中屬性,運動作用在繞Z軸旋轉(zhuǎn),運動類型選擇速度,初始位移為零,為恒定值,角速度是每秒種5度.如圖7.
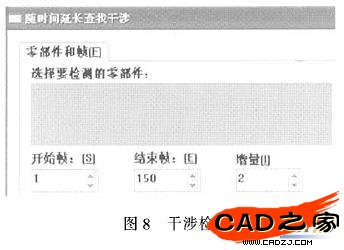
9) COSMOSMOTION中應(yīng)首先對其零件的干涉檢查,點擊查找干涉,如圖8.選擇要檢測的零件,現(xiàn)在就查找,顯示不存在干涉,
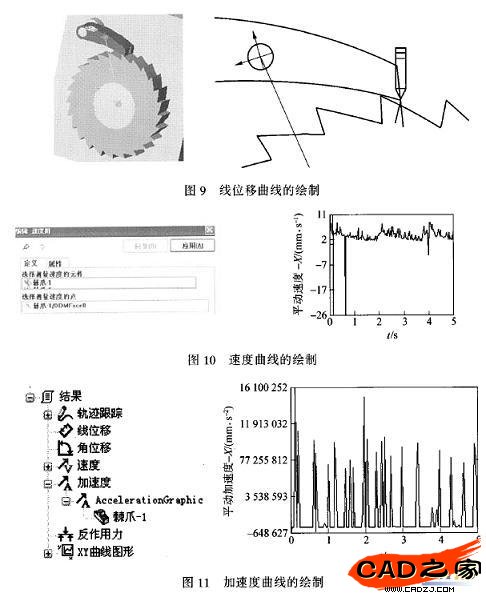
10)單擊智能運動構(gòu)件器巾的仿真在參數(shù)中輸入5秒種,幀的數(shù)目100,點擊仿真.右擊軌跡跟蹤,如圖9.選擇中的棘輪上的尖點,出現(xiàn)的軌跡如圖9.
11)右擊速度,生成速度.選擇棘輪以及棘輪上的尖點,并且右擊速度繪制曲線X軸分量如圖10,從圖中可以看出最大值以及最小值.
12)右擊加速度,生成加速度選擇棘輪以及棘輪上的尖點,而且右擊加速度繪制曲線X軸分量,如圖11,同樣可從圖中可以看出最大值以及最小值.
13)由于在自帶的插件COSMOSMOTION分析不是那么方便,我們可以將運動中輸出結(jié)果格式保存為*. csv到電子表格EXCEL中,輕松通過各種函數(shù)可以看出它的速度、加速度、角度的最值,同時也插入圖表可作進一步的分析.
2小結(jié)
分析了機械常用的棘輪機構(gòu)在SOLIDWORKS軟件中進行建模、裝配、干涉檢查、以及在COSMOSMOTION中進行運動特點的分析.各行工程技術(shù)人員應(yīng)逐步認識到CAD/CAM/CAE技術(shù)在現(xiàn)在工程中的重要性,掌握其中的一種或幾種軟件的方法和技巧,已經(jīng)成為工程技術(shù)人員參與日益激烈的市場競爭的必備技能之一。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計算機應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計案例教程中文版AutoCAD 建筑設(shè)計案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機械A(chǔ)utoCAD 項目教程 第3版 [繆希偉 主編] 2012年P(guān)DF