模型裝配好后,就可以開始進行運動仿真了。
1 打開裝配模型
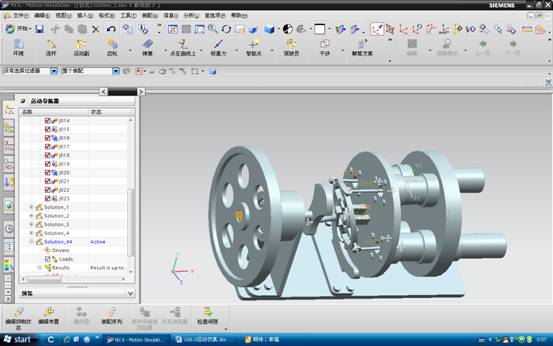
2 點左上角 “開始”按鈕,選擇“運動仿真”
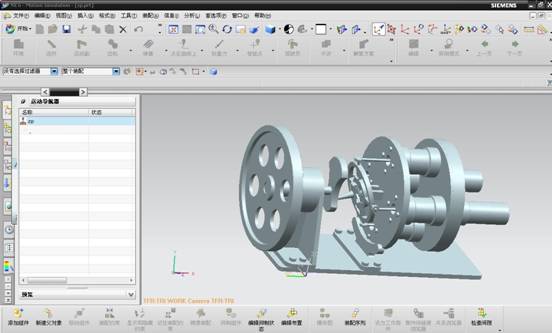
3 找到左邊的“裝配導航器”,右鍵點擊模型名稱,選“新建仿真”,在出現的“環境”對話框中,選“動態”,點確定

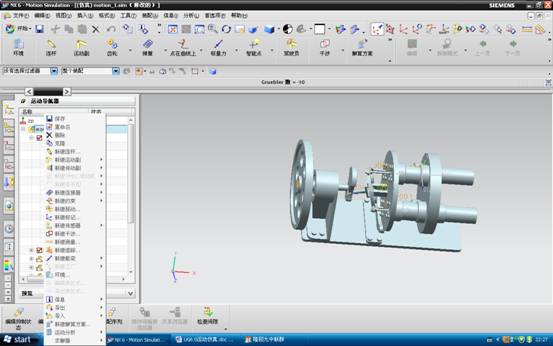
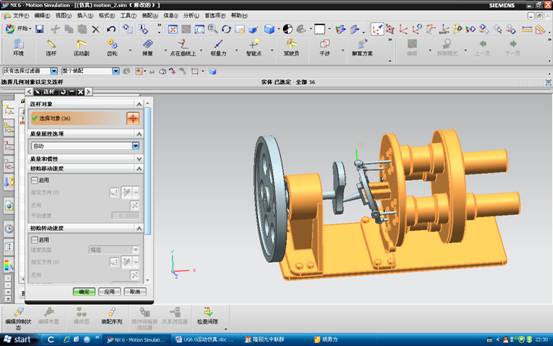
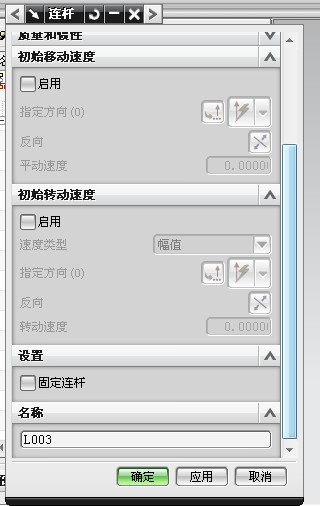
4 激活運動仿真后,右鍵單擊“motion_1”,在拉出的菜單中單擊“新建連桿”
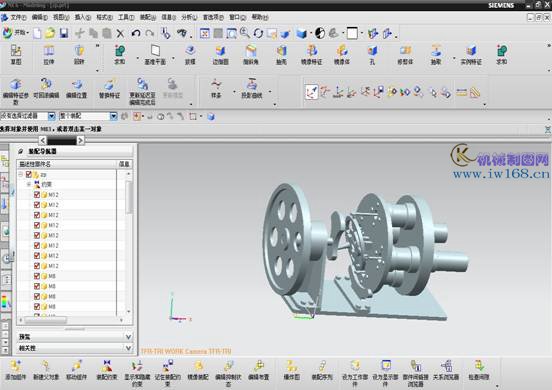
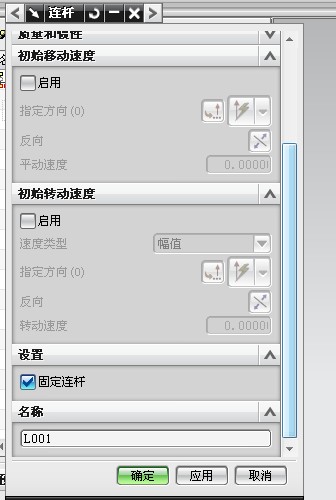
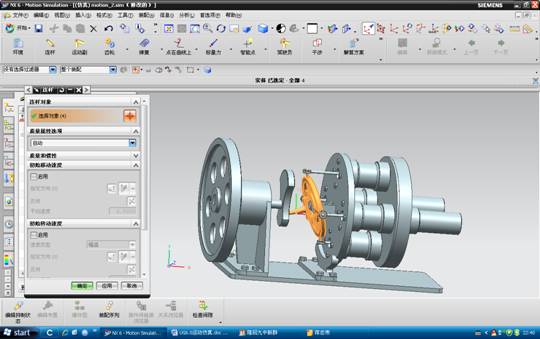
5 選擇各固定件,如下圖所示,設為固定連桿
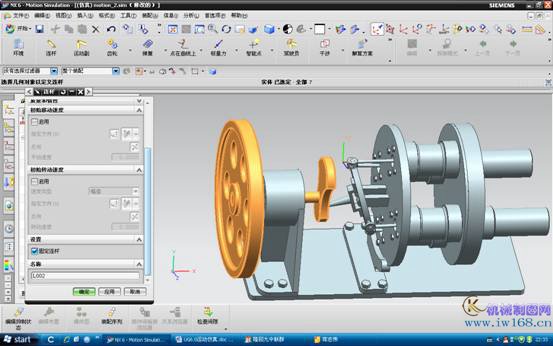
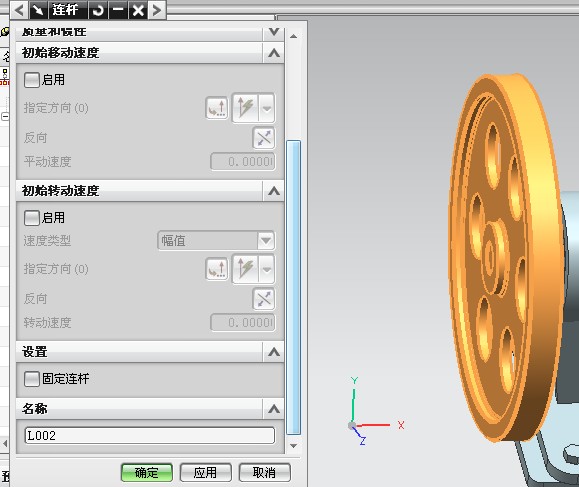
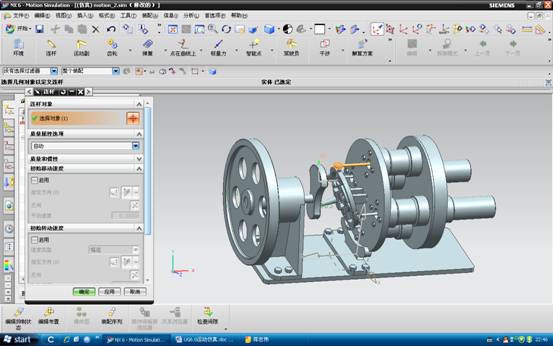
6 同上,繼續新建連桿,建立旋轉部件,如下圖所示
7 、同上,建立連桿,如下圖
8 、同上,分別選擇萬向節所旋轉的銷和四個拉桿,分別建立連桿,如下圖
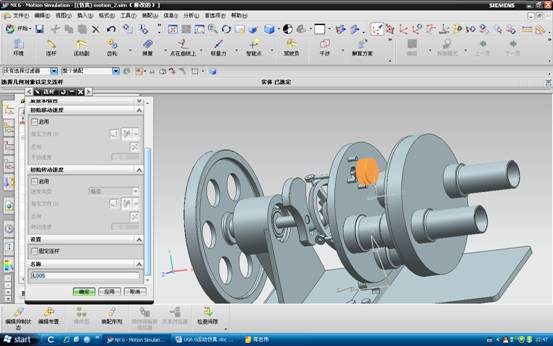
9 、同上,分別選擇四個活塞,分別建立連桿
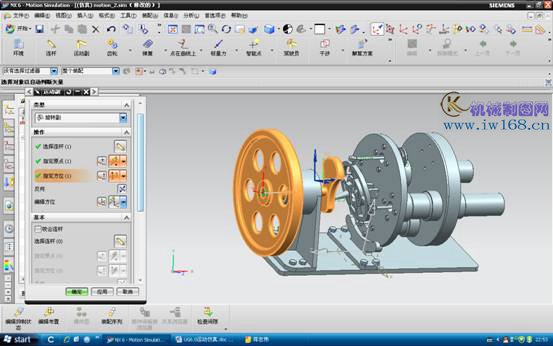
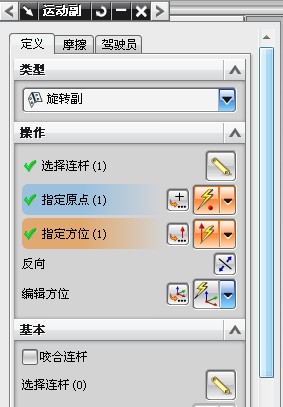
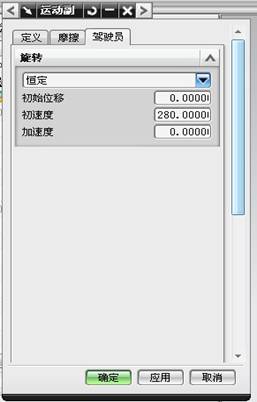
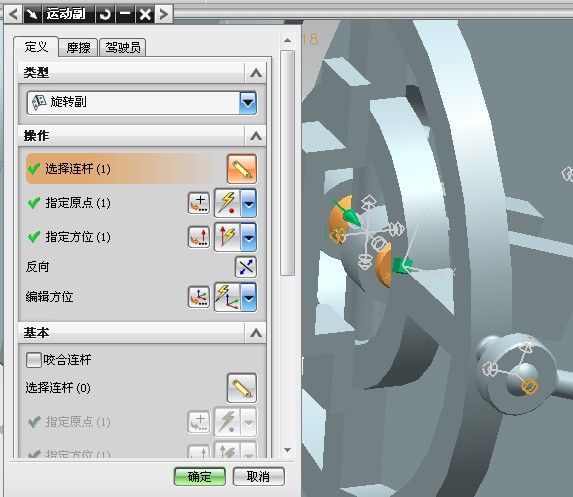
10、 右鍵單擊“motion_1”-“新運動副”-“旋轉副”,選擇連桿L002
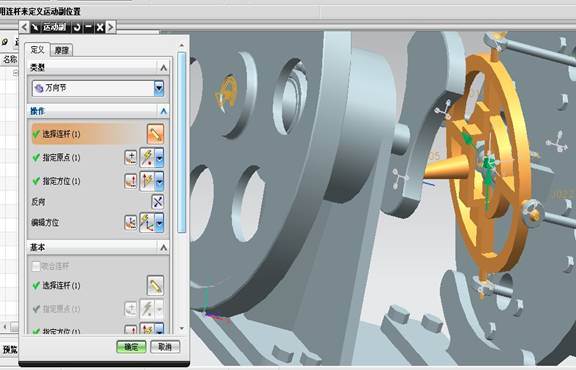
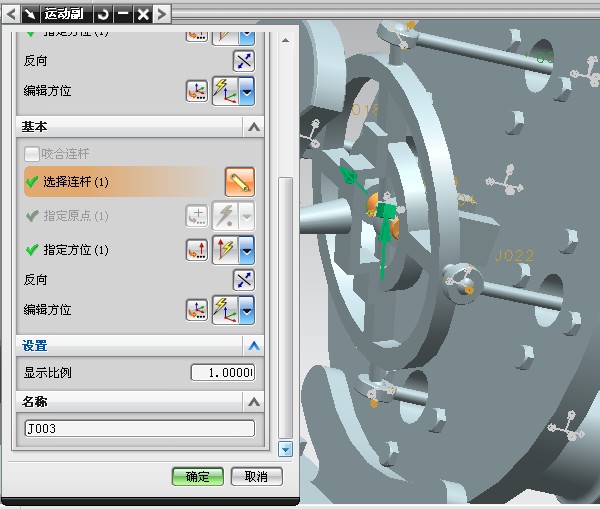
11 、右鍵單擊“motion_1”-“新運動副”-“萬向節”,選擇連桿L003
指定萬向節旋轉的中心為原點,指定Y軸為矢量方向,指定咬合的連桿為萬向節所繞旋轉的銷,指定銷的軸向為旋轉方向。
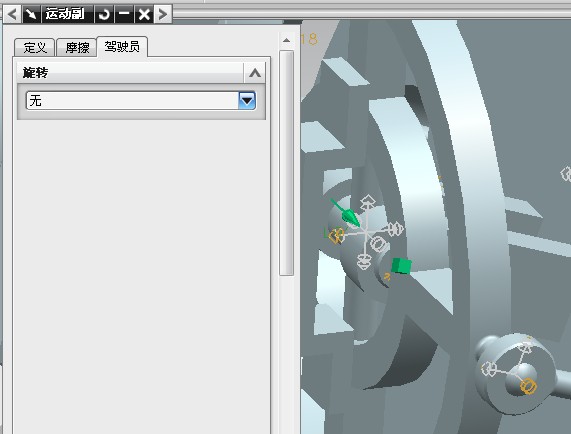
12、新建旋轉副,如下圖
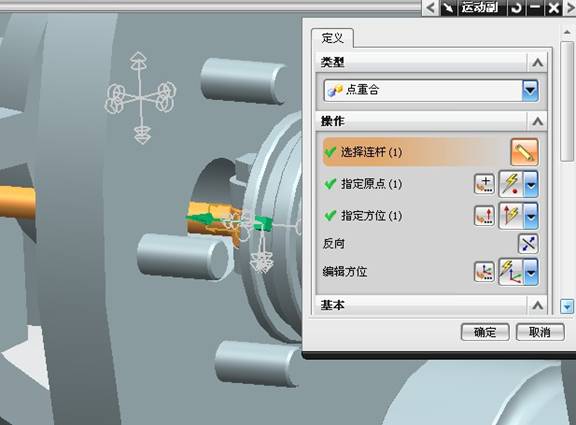
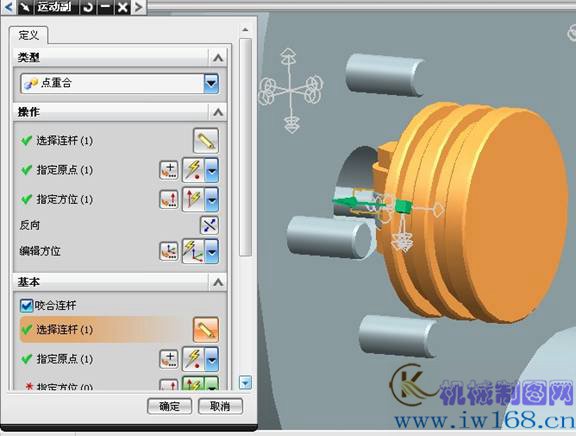
13 、右鍵單擊“motion_1”-“運動副”-“點重合”
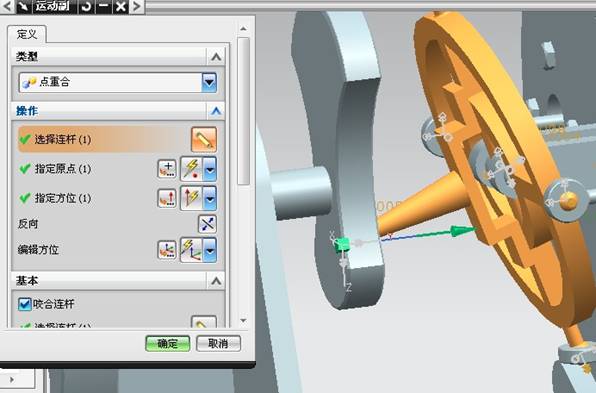
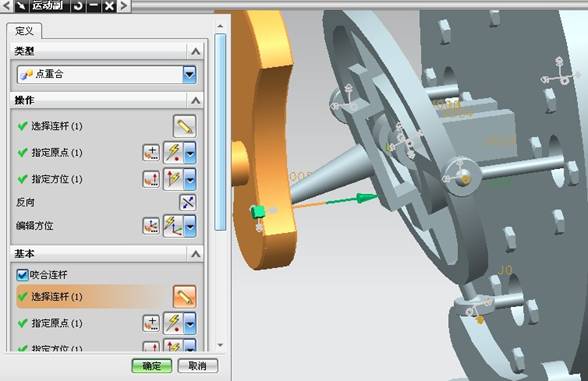
14、 右鍵單擊“motion_1”-“運動副”-“點重合”
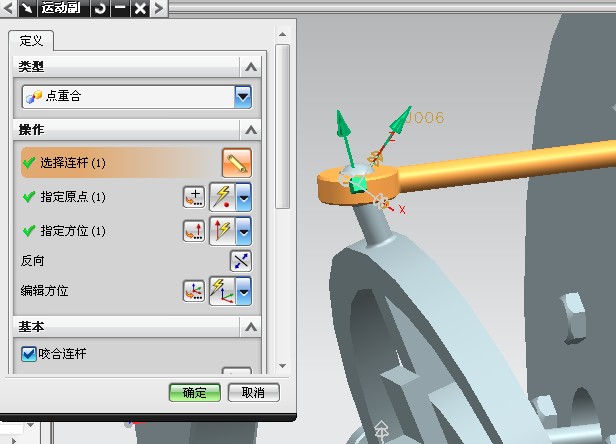
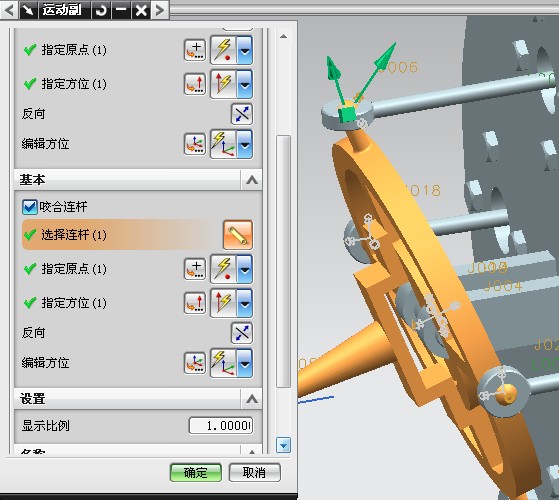
15 、右鍵單擊“motion_1”-“運動副”-“點重合”
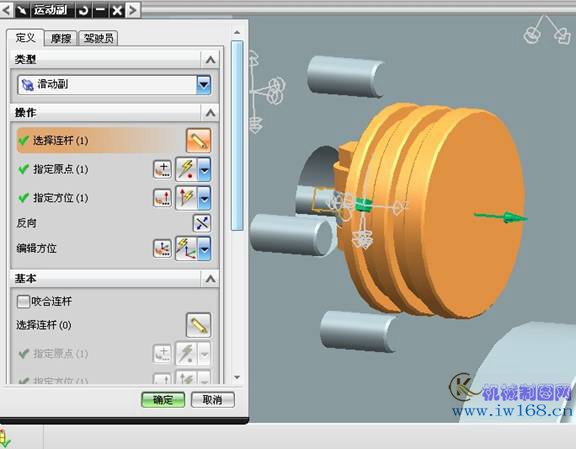
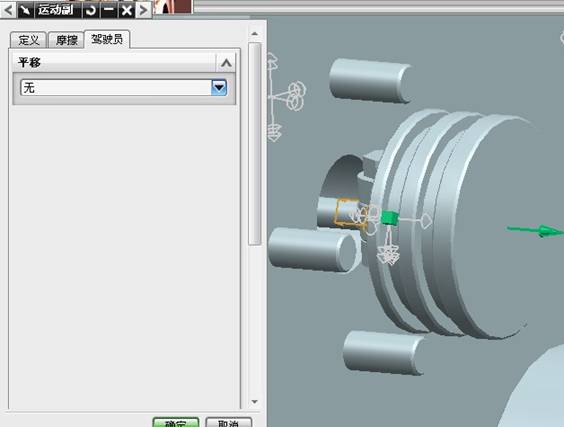
16、 右鍵單擊“motion_1”-“運動副”-“滑動副”
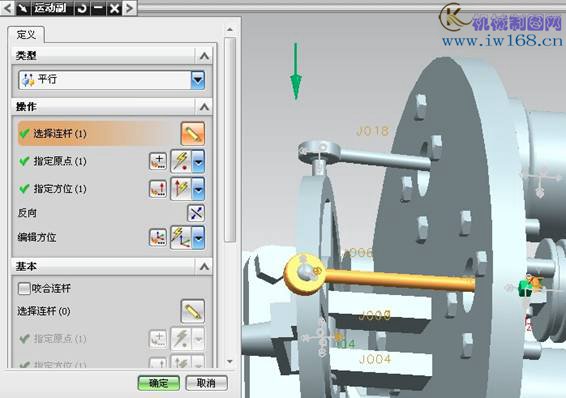
17、 右鍵單擊“motion_1”-“運動副”-“平行”
18 、重復步驟14、15、16、17,把其它三個活塞和拉桿設置好。
19、 點“解算方案”
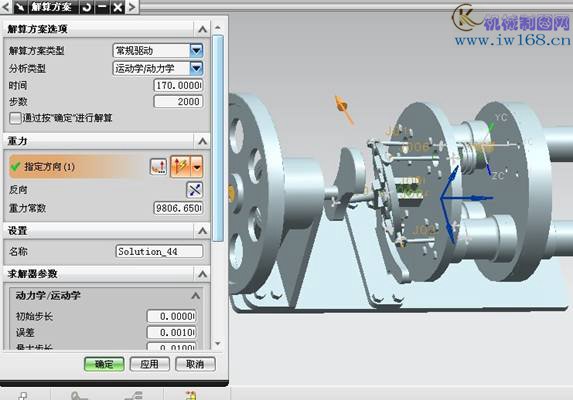
20、 點菜單“分析”-“運動”-“解算”
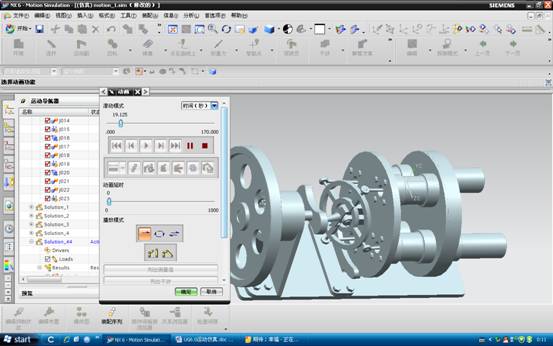
21、點菜單“分析”-“運動”-“動畫”,調出動畫控制對話框
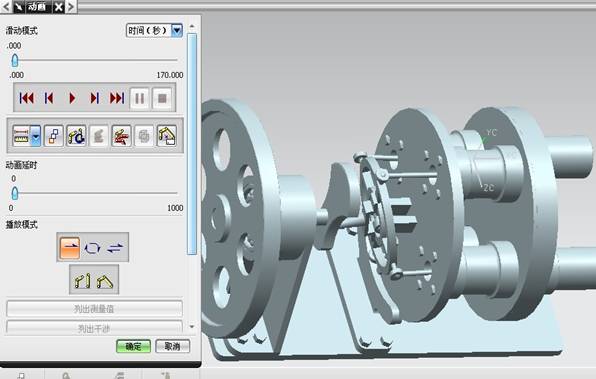
點 就可以播放出仿真效果來了
就可以播放出仿真效果來了