2工作裝置的仿真分析
設定好初始條件后,運行仿真,對仿真的結果進行分析如下。
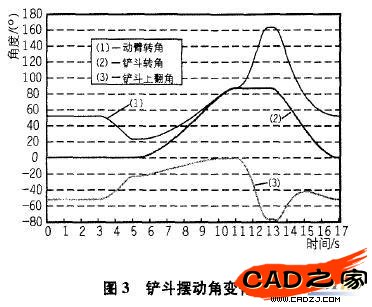
2.1鏟斗平動
圖3為工作裝置鏟掘、舉升、降落時鏟斗擺動角變化規律。為了避免物料散落,要求當轉斗油缸閉鎖,動臂油缸使動臂舉升時,連桿機構能使鏟斗接近平動,其擺動角≤15°。圖中在5~11s動臂舉升這段曲線匕鏟斗仁翻角在-20.5°~-1.5°范圍變化。在5-6.5s范圍內擺動角不滿足要求,其它時間段擺動角均滿足要求。說明動臂在舉升開始時,鏟斗的運動不是平動,裝載的物料有散落,其它過程中鏟斗基本保持水平。因此可以對工作裝置6桿機構進行調整優化,以滿足鏟斗平動性要求。
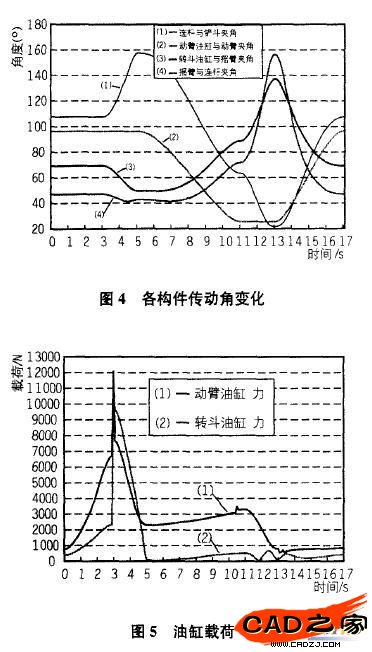
2.2工作裝置傳動角
圖4為工作裝置在作業過程中連桿與鏟斗傳動角、動臂油缸對動臂傳動角、轉斗油缸對搖臂傳動角、搖臂對連桿傳動角的變化曲線,圖中可以看出它們對應的最小傳動角分別為22.3°(5s),25.50(11~13s),42.7°(13s)和23.4°(13s),都符合傳動角大于10°的要求除連桿與鏟斗傳動角外,其它最小傳動角的發生位置均在卸載結束后。說明該裝載機工作裝置動力設計是合理的,滿足設計的要求。
2.3油缸受力
圖5為轉斗油缸活塞桿和動臂油缸活塞桿在作業過程中的受力變化。可以看出在1~3s鏟斗插入料堆時,轉斗油缸和動臂油缸受力變化趨勢基本一致,隨著鏟斗鏟掘深度的增加而增加,此時轉斗油缸和動臂油缸的閉鎖力分別為2340N和6728N;鏟斗插人料堆完成后,鏟斗翻轉,在3s時達到了最大值,此時轉斗油缸的主動力為11270N,動臂油缸的閉鎖力12074N,鏟掘完成后作用力迅速下降;在5~11s動臂重載舉升過程中,作用力基本平穩,最大舉升力為3292N;在鏟斗翻轉卸載時,轉斗油缸作用力出現了突變點,卸載完后,作用力下降。
通過上述仿真分析,完成了裝載機工作裝置的性能評價。根據仿真的數據變化以及模型的運動,了解所設計ZL20裝載機工作裝置的綜合性能,其結果可以用來修改完善設計方案,使設計的裝載機工作裝置性能得到提高,所使用的仿真方法對裝載機工作裝置設計具有重要的參考價值。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF