副標(biāo)題#e# 0前言
機械系統(tǒng)動力學(xué)分析是一個很古老的研究課題,現(xiàn)在的解決方法已經(jīng)很多。隨著較大型的計算機軟件的不斷發(fā)展,需要一種簡單實用、直觀精確的研究方法。筆者發(fā)現(xiàn),三維設(shè)計軟件SolidWorks建模較為簡單,初學(xué)者容易上手,加之后期版本中無縫集成了全功能運動仿真軟件COSMOSMotion,可以對復(fù)雜機械系統(tǒng)進行完整的運動學(xué)仿真和動態(tài)靜力學(xué)分析。若將其仿真得到的大量機械系統(tǒng)運動及動力學(xué)參數(shù)(諸如每個零部件的動能曲線、系統(tǒng)平衡力矩曲線等),運用Excel電子表格進行處理就可以建立起機械系統(tǒng)的動力學(xué)模型,然后用微分方程的數(shù)值解法--差分法就可以很容易地求解出機械系統(tǒng)在穩(wěn)定運轉(zhuǎn)階段的真實運動規(guī)律。
基于這種思路,筆者以牛頭刨床為例,經(jīng)過多次反復(fù)試驗摸索,最終得到了一種較為簡單的機械系統(tǒng)動力學(xué)分析方法。即,首先利用Solidworks軟件建立機械系統(tǒng)三維模型,然后用COSMOSMotion軟件進行運動仿真,并將其仿真結(jié)果輸出到Excel電子表格中。接著在Excel電子表格中對這些仿真結(jié)果進行數(shù)據(jù)分析處理,從而得到機械系統(tǒng)的等效參數(shù)(如等效轉(zhuǎn)動慣量、等效力矩等),建立起機械系統(tǒng)的動力學(xué)方程式,最后利用Excel的公式計算功能,求解出動力學(xué)方程的數(shù)值解-機械系統(tǒng)的真實運動規(guī)律。
這種機械系統(tǒng)動力學(xué)分析方法,最大的優(yōu)勢在于:SolidWorks操作技術(shù)容易掌握;COSMOSMotion仿真功能強大,且對約束、力、力矩、運動等概念的定義與機械原理中的定義一致,容易理解;Excel軟件較為常用;整個求解過程不用編程。
以下介紹這種方法在牛頭刨床機械系統(tǒng)動力學(xué)分析中的應(yīng)用。
1建立虛擬樣機
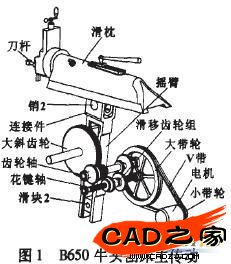
B650牛頭刨床主要由滑枕、搖臂、大斜齒輪、齒輪變速/減速裝置、帶傳動、電機、工作臺、進給裝置和機身等組成。按照實測數(shù)據(jù),在SolidWorks中,對所有零件進行制作、裝配,最后得到圖1所示虛擬樣機(圖中機身等零件已隱藏)。從圖1中可以反映出主傳動路線:電機一帶傳動(小帶輪一大帶輪)一花鍵軸-滑移齒輪組一齒輪軸一大斜齒輪-滑塊1(圖中不可見)-搖臂及滑塊2一連接件、銷1及2一滑枕、刀桿。
為了便于分析,假定牛頭刨床的齒輪變速裝置處于圖示的嚙合狀態(tài)。其傳動參數(shù)如下:小帶輪基準(zhǔn)直徑75mm,大帶輪基準(zhǔn)直徑355mm,花鍵軸與齒輪軸之間參與嚙合的齒輪齒數(shù)分別為55和36,齒輪軸與大斜齒輪之間參與嚙合的齒輪齒數(shù)分別為21和84。
2運動仿真
COsM0sMotion軟件仿真功能較強,支持多種約束和虛約束,可分別按位移、速度或加速度定義各種運動,包括定值、步進、諧波、樣條曲線和函數(shù)等運動。用COSMOsMotion可以仿真各種復(fù)雜機械系統(tǒng)的精確運動和進行動態(tài)靜力學(xué)分析。
仿真成功與否的關(guān)鍵在于仿真參數(shù)的設(shè)置。COSMOSMotion仿真設(shè)置包括劃分運動和靜止零部件、添加運動副約束、定義原動件運動、添加工作阻力等。
2.1零部件分組
在COSMOSMotion中,需要將零部件劃分為兩類:運動零部件和靜止零部件。筆者將與運動分析有關(guān)的零部件放到運動零部件組,與運動分析無關(guān)的或運動分析時固定不動的零部件設(shè)為靜止零部件(可將V帶設(shè)為靜止零部件)。為了觀察方便,一般將影響觀察的靜止零部件壓縮或隱藏。
2.2添加約束
在進入COSMOSMotion界面時,軟件會根據(jù)裝配圖中零部件之間的配合關(guān)系自動為零部件添加約束。但在仿真時還應(yīng)根據(jù)具體分析對象和分析內(nèi)容,對一些約束進行必要的增刪調(diào)整。
C0SMOSMotion中的"固定副"約束用于鎖住2個剛性構(gòu)件,使之不能做相對運動,相當(dāng)于現(xiàn)實世界中將2個構(gòu)件焊接在一起。筆者所研究的牛頭刨床中刀桿、連接件與滑枕之間,銷1、銷2與連接件之間,大帶輪、滑移齒輪組與花鍵軸之間無相對運動,所以它們之間的約束采用"固定副"。
"旋轉(zhuǎn)副"約束只允許2個剛性構(gòu)件之間有1個自由度的相對轉(zhuǎn)動。牛頭刨床中電機與小帶輪(含電機轉(zhuǎn)子)之間,花鍵軸與軸承(相當(dāng)于機架)之間,齒輪軸與軸承(相當(dāng)于機架)之間,大斜齒輪(曲柄)與機架(機身)之間,大斜齒輪(相當(dāng)于曲柄)與滑塊l之間,滑塊2與機架(機身)之間,搖臂與連接件(或銷1)之間均只有1個相對轉(zhuǎn)動,所以它們之間的約束采用"旋轉(zhuǎn)副"。
"移動副"約束只允許2個剛性構(gòu)件之間有1個自由度的相對移動。牛頭刨床中滑塊l、滑塊2與搖臂之間,滑枕與機架(機身)之間均只有1個相對移動,所以它們之間的約束采用"移動副"。在COSMOSMotion軟件中,齒輪傳動、帶傳動的運動仿真是依靠"耦合"來實現(xiàn)的。牛頭刨床中的小帶輪與大帶輪之間為帶傳動,滑移齒輪組(或花鍵軸)與齒輪軸之間、齒輪軸與大斜齒輪之間均為齒輪傳動,所以應(yīng)采用"耦合"方式定義它們之間的運動關(guān)系。3個"耦合"的傳動比分別為355/75、36/55和84/21。
2.3輸入運動
為了分析方便,選取大斜齒輪(相當(dāng)于導(dǎo)桿機構(gòu)之曲柄)作為系統(tǒng)運動分析時的原動件,其轉(zhuǎn)速可按真實系統(tǒng)中的轉(zhuǎn)速n4設(shè)定。
故在COSMOSMotion界面,設(shè)置大斜齒輪的轉(zhuǎn)速為"恒定值"720(°)/s。
原動件轉(zhuǎn)速也可以任選。因為建立等效動力學(xué)模型時,在系統(tǒng)等效轉(zhuǎn)動慣量和等效力矩計算中使用的是各構(gòu)件與原動件速度的比值,而與真實速度無關(guān)。
2.4添加工作阻力
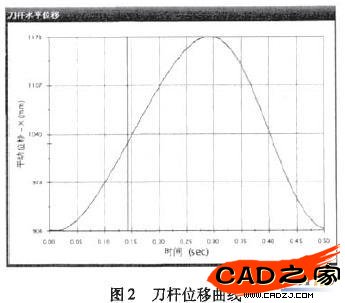
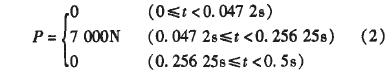
由于刀桿只在切削工件時有工作阻力,所以需要先進行運動仿真,得到刀桿的位移曲線(圖2),才能確定出工作阻力P與仿真時間t之間的函數(shù)關(guān)系式:
這樣就可以在COSMOSMotion中以函數(shù)形式為"刀桿"零部件添加工作阻力,其表達式為:IF(TIME-0.0472:0,7 000,IF(TIME-0.256 25:7000,0,IF(TIME-0.5:0,0,0)))。
機械系統(tǒng)動力學(xué)分析是一個很古老的研究課題,現(xiàn)在的解決方法已經(jīng)很多。隨著較大型的計算機軟件的不斷發(fā)展,需要一種簡單實用、直觀精確的研究方法。筆者發(fā)現(xiàn),三維設(shè)計軟件SolidWorks建模較為簡單,初學(xué)者容易上手,加之后期版本中無縫集成了全功能運動仿真軟件COSMOSMotion,可以對復(fù)雜機械系統(tǒng)進行完整的運動學(xué)仿真和動態(tài)靜力學(xué)分析。若將其仿真得到的大量機械系統(tǒng)運動及動力學(xué)參數(shù)(諸如每個零部件的動能曲線、系統(tǒng)平衡力矩曲線等),運用Excel電子表格進行處理就可以建立起機械系統(tǒng)的動力學(xué)模型,然后用微分方程的數(shù)值解法--差分法就可以很容易地求解出機械系統(tǒng)在穩(wěn)定運轉(zhuǎn)階段的真實運動規(guī)律。
基于這種思路,筆者以牛頭刨床為例,經(jīng)過多次反復(fù)試驗摸索,最終得到了一種較為簡單的機械系統(tǒng)動力學(xué)分析方法。即,首先利用Solidworks軟件建立機械系統(tǒng)三維模型,然后用COSMOSMotion軟件進行運動仿真,并將其仿真結(jié)果輸出到Excel電子表格中。接著在Excel電子表格中對這些仿真結(jié)果進行數(shù)據(jù)分析處理,從而得到機械系統(tǒng)的等效參數(shù)(如等效轉(zhuǎn)動慣量、等效力矩等),建立起機械系統(tǒng)的動力學(xué)方程式,最后利用Excel的公式計算功能,求解出動力學(xué)方程的數(shù)值解-機械系統(tǒng)的真實運動規(guī)律。
這種機械系統(tǒng)動力學(xué)分析方法,最大的優(yōu)勢在于:SolidWorks操作技術(shù)容易掌握;COSMOSMotion仿真功能強大,且對約束、力、力矩、運動等概念的定義與機械原理中的定義一致,容易理解;Excel軟件較為常用;整個求解過程不用編程。
以下介紹這種方法在牛頭刨床機械系統(tǒng)動力學(xué)分析中的應(yīng)用。
1建立虛擬樣機
B650牛頭刨床主要由滑枕、搖臂、大斜齒輪、齒輪變速/減速裝置、帶傳動、電機、工作臺、進給裝置和機身等組成。按照實測數(shù)據(jù),在SolidWorks中,對所有零件進行制作、裝配,最后得到圖1所示虛擬樣機(圖中機身等零件已隱藏)。從圖1中可以反映出主傳動路線:電機一帶傳動(小帶輪一大帶輪)一花鍵軸-滑移齒輪組一齒輪軸一大斜齒輪-滑塊1(圖中不可見)-搖臂及滑塊2一連接件、銷1及2一滑枕、刀桿。
為了便于分析,假定牛頭刨床的齒輪變速裝置處于圖示的嚙合狀態(tài)。其傳動參數(shù)如下:小帶輪基準(zhǔn)直徑75mm,大帶輪基準(zhǔn)直徑355mm,花鍵軸與齒輪軸之間參與嚙合的齒輪齒數(shù)分別為55和36,齒輪軸與大斜齒輪之間參與嚙合的齒輪齒數(shù)分別為21和84。
2運動仿真
COsM0sMotion軟件仿真功能較強,支持多種約束和虛約束,可分別按位移、速度或加速度定義各種運動,包括定值、步進、諧波、樣條曲線和函數(shù)等運動。用COSMOsMotion可以仿真各種復(fù)雜機械系統(tǒng)的精確運動和進行動態(tài)靜力學(xué)分析。
仿真成功與否的關(guān)鍵在于仿真參數(shù)的設(shè)置。COSMOSMotion仿真設(shè)置包括劃分運動和靜止零部件、添加運動副約束、定義原動件運動、添加工作阻力等。
2.1零部件分組
在COSMOSMotion中,需要將零部件劃分為兩類:運動零部件和靜止零部件。筆者將與運動分析有關(guān)的零部件放到運動零部件組,與運動分析無關(guān)的或運動分析時固定不動的零部件設(shè)為靜止零部件(可將V帶設(shè)為靜止零部件)。為了觀察方便,一般將影響觀察的靜止零部件壓縮或隱藏。
2.2添加約束
在進入COSMOSMotion界面時,軟件會根據(jù)裝配圖中零部件之間的配合關(guān)系自動為零部件添加約束。但在仿真時還應(yīng)根據(jù)具體分析對象和分析內(nèi)容,對一些約束進行必要的增刪調(diào)整。
C0SMOSMotion中的"固定副"約束用于鎖住2個剛性構(gòu)件,使之不能做相對運動,相當(dāng)于現(xiàn)實世界中將2個構(gòu)件焊接在一起。筆者所研究的牛頭刨床中刀桿、連接件與滑枕之間,銷1、銷2與連接件之間,大帶輪、滑移齒輪組與花鍵軸之間無相對運動,所以它們之間的約束采用"固定副"。
"旋轉(zhuǎn)副"約束只允許2個剛性構(gòu)件之間有1個自由度的相對轉(zhuǎn)動。牛頭刨床中電機與小帶輪(含電機轉(zhuǎn)子)之間,花鍵軸與軸承(相當(dāng)于機架)之間,齒輪軸與軸承(相當(dāng)于機架)之間,大斜齒輪(曲柄)與機架(機身)之間,大斜齒輪(相當(dāng)于曲柄)與滑塊l之間,滑塊2與機架(機身)之間,搖臂與連接件(或銷1)之間均只有1個相對轉(zhuǎn)動,所以它們之間的約束采用"旋轉(zhuǎn)副"。
"移動副"約束只允許2個剛性構(gòu)件之間有1個自由度的相對移動。牛頭刨床中滑塊l、滑塊2與搖臂之間,滑枕與機架(機身)之間均只有1個相對移動,所以它們之間的約束采用"移動副"。在COSMOSMotion軟件中,齒輪傳動、帶傳動的運動仿真是依靠"耦合"來實現(xiàn)的。牛頭刨床中的小帶輪與大帶輪之間為帶傳動,滑移齒輪組(或花鍵軸)與齒輪軸之間、齒輪軸與大斜齒輪之間均為齒輪傳動,所以應(yīng)采用"耦合"方式定義它們之間的運動關(guān)系。3個"耦合"的傳動比分別為355/75、36/55和84/21。
2.3輸入運動
為了分析方便,選取大斜齒輪(相當(dāng)于導(dǎo)桿機構(gòu)之曲柄)作為系統(tǒng)運動分析時的原動件,其轉(zhuǎn)速可按真實系統(tǒng)中的轉(zhuǎn)速n4設(shè)定。
故在COSMOSMotion界面,設(shè)置大斜齒輪的轉(zhuǎn)速為"恒定值"720(°)/s。
原動件轉(zhuǎn)速也可以任選。因為建立等效動力學(xué)模型時,在系統(tǒng)等效轉(zhuǎn)動慣量和等效力矩計算中使用的是各構(gòu)件與原動件速度的比值,而與真實速度無關(guān)。
2.4添加工作阻力
由于刀桿只在切削工件時有工作阻力,所以需要先進行運動仿真,得到刀桿的位移曲線(圖2),才能確定出工作阻力P與仿真時間t之間的函數(shù)關(guān)系式:
這樣就可以在COSMOSMotion中以函數(shù)形式為"刀桿"零部件添加工作阻力,其表達式為:IF(TIME-0.0472:0,7 000,IF(TIME-0.256 25:7000,0,IF(TIME-0.5:0,0,0)))。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計算機應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計案例教程中文版AutoCAD 建筑設(shè)計案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機械A(chǔ)utoCAD 項目教程 第3版 [繆希偉 主編] 2012年P(guān)DF