副標題#e# 引言
德國TR08磁浮車輛系統為減輕自重,大量部件采用了高強度、高彈性、低密度的鋁鐵合金材料。其中,懸浮架就是典型的彈性結構,其彈性變形對磁浮列車電磁鐵運動解耦十分有利,特別是列車高速通過曲線時,彈性結構對系統的動態響應有著不可忽視的影響。然而,目前磁浮車輛系統動力學建模一般都將車輛考慮為多剛體結構。建立基于剛性車體和彈性懸浮架的磁浮車輛系統動力學模型.研究了控制算法對懸浮架動態解耦能力的影響。基于彈性懸浮架與多控制器耦合系統模型,研究了彈性懸浮架的機械解耦作用。但基于彈性懸浮架模犁的整車動力學研究尚未見相關文獻發表。
本文聯合利用CAD軟件SolidWorks、有限元分析軟件ANSYS以及多體動力學仿真軟件SIMPACK,建立彈性懸浮架模犁和混合剛彈性磁浮車輛動力學模型,仿真分析了高速磁浮車輛彈性懸浮架曲線通過動態響應。
1彈性體動態響應計算原理
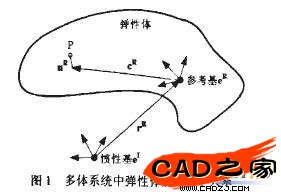
多體系統中彈性體七某點的全局運動包括彈性體剛體運動及其彈性變形;在小變形條件下,彈性體建模可獨立于多剛體系統,彈性變形一般采用模態疊加法求解。彈性體上某點P的運動學關系如圖1所示。圖1中定義了慣性基eI和固結丁彈性體上的參考基eR,uR是P點彈性變形矢量,eR是P點未變形時相對參考系的位置矢量,tR為慣性系相對于參考系的位置矢量。P點的絕對位置矢量可表示為
r(t)=AR(rR+cR+uR) (1)
式中,AI是參考基相對于慣性基的方向余弦矩陣。
對公式(1)進行微分運算可得到P點的速度和加速度,由Green應變和Hooke定律則可得應力應變公式,又依據Jourdain虛功原理,可得公式(2)所示彈性體運動方程。
M(q)b+KΩ(Ω,q,q1)+Kq(q,q1)=F(r,A,q,…) (2)
式中,加速度矢量b包括了線加速度a、角加速度Ω1和彈性振動加速度q2,M是質量矩陣,KΩ為剛彈性耦合力項,Kq是彈性力項,F是外力矢量。
依據上述計算原理,SIMPACK軟件提供了FEMBS接口模塊.它需要輸入的彈性體數據有:(1)相對于參考系的節點描述(坐標和自由度等);(2)質量矩陣、剛度矩陣和阻尼矩陣:(3)模態振型矩陣;(4)幾何剛化矩陣及載荷向量。這些數據可通過有限元分析得到。
2彈性懸浮架有限元分析
2.1有限元建模
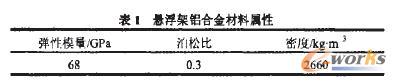
TR08磁浮車輛的懸浮架豐要由前后兩個懸浮框和縱梁組成,懸浮框由左右兩個C形懸浮臂和橫梁組成,各部件之間通過螺栓連接或焊接而成,總質苗約1.32t。表1列出了懸浮架的鋁合金材料屬性。
首先,在SolidWorks中建立了懸浮架三維文體模型,建模時忽略板筋、凹槽、螺栓孔、倒角等不重要的細節。將實體模型調入ANSYS,選用實體單元Solid95和Solid92進行網格劃分。需要說明的是,網格劃分后的節點必須包括SIMPACK環境中懸浮架的關鍵點,如與其它剛體部件的鉸點、約束節點以及需要獲取結構響應的節點,這就需要采用平面切割法控制剛格劃分。圖2給出了懸浮架有限元模型,圖中數字1~8是懸浮臂弓形腳上鉸點的編號。
德國TR08磁浮車輛系統為減輕自重,大量部件采用了高強度、高彈性、低密度的鋁鐵合金材料。其中,懸浮架就是典型的彈性結構,其彈性變形對磁浮列車電磁鐵運動解耦十分有利,特別是列車高速通過曲線時,彈性結構對系統的動態響應有著不可忽視的影響。然而,目前磁浮車輛系統動力學建模一般都將車輛考慮為多剛體結構。建立基于剛性車體和彈性懸浮架的磁浮車輛系統動力學模型.研究了控制算法對懸浮架動態解耦能力的影響。基于彈性懸浮架與多控制器耦合系統模型,研究了彈性懸浮架的機械解耦作用。但基于彈性懸浮架模犁的整車動力學研究尚未見相關文獻發表。
本文聯合利用CAD軟件SolidWorks、有限元分析軟件ANSYS以及多體動力學仿真軟件SIMPACK,建立彈性懸浮架模犁和混合剛彈性磁浮車輛動力學模型,仿真分析了高速磁浮車輛彈性懸浮架曲線通過動態響應。
1彈性體動態響應計算原理
多體系統中彈性體七某點的全局運動包括彈性體剛體運動及其彈性變形;在小變形條件下,彈性體建模可獨立于多剛體系統,彈性變形一般采用模態疊加法求解。彈性體上某點P的運動學關系如圖1所示。圖1中定義了慣性基eI和固結丁彈性體上的參考基eR,uR是P點彈性變形矢量,eR是P點未變形時相對參考系的位置矢量,tR為慣性系相對于參考系的位置矢量。P點的絕對位置矢量可表示為
r(t)=AR(rR+cR+uR) (1)
式中,AI是參考基相對于慣性基的方向余弦矩陣。
對公式(1)進行微分運算可得到P點的速度和加速度,由Green應變和Hooke定律則可得應力應變公式,又依據Jourdain虛功原理,可得公式(2)所示彈性體運動方程。
M(q)b+KΩ(Ω,q,q1)+Kq(q,q1)=F(r,A,q,…) (2)
式中,加速度矢量b包括了線加速度a、角加速度Ω1和彈性振動加速度q2,M是質量矩陣,KΩ為剛彈性耦合力項,Kq是彈性力項,F是外力矢量。
依據上述計算原理,SIMPACK軟件提供了FEMBS接口模塊.它需要輸入的彈性體數據有:(1)相對于參考系的節點描述(坐標和自由度等);(2)質量矩陣、剛度矩陣和阻尼矩陣:(3)模態振型矩陣;(4)幾何剛化矩陣及載荷向量。這些數據可通過有限元分析得到。
2彈性懸浮架有限元分析
2.1有限元建模
TR08磁浮車輛的懸浮架豐要由前后兩個懸浮框和縱梁組成,懸浮框由左右兩個C形懸浮臂和橫梁組成,各部件之間通過螺栓連接或焊接而成,總質苗約1.32t。表1列出了懸浮架的鋁合金材料屬性。
首先,在SolidWorks中建立了懸浮架三維文體模型,建模時忽略板筋、凹槽、螺栓孔、倒角等不重要的細節。將實體模型調入ANSYS,選用實體單元Solid95和Solid92進行網格劃分。需要說明的是,網格劃分后的節點必須包括SIMPACK環境中懸浮架的關鍵點,如與其它剛體部件的鉸點、約束節點以及需要獲取結構響應的節點,這就需要采用平面切割法控制剛格劃分。圖2給出了懸浮架有限元模型,圖中數字1~8是懸浮臂弓形腳上鉸點的編號。

為了提高SIMPACK中模型的汁算效率,還需用子結構法將有限元模型凝聚為一個超單元。即通過定義一組節點的自由度作為豐自由度,縮減其它節點的自由度,再將縮減解擴展劍完整的自由度集上。其中,主自由度的選取遵循如下原則:(1)大質量、低頻率:(2)保持結構的整體外形;(3)均勻分布;(4)保留關鍵節點自由度。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF