副標(biāo)題#e# 1機(jī)器人示教編程方法的發(fā)展
機(jī)器人示教編程方式有兩種:在線示教、離線示教。在線示教即手把手示教,簡單方便,適用于大批量生產(chǎn),所完成的任務(wù)簡單單一,但是隨著機(jī)器人適用任務(wù)的擴(kuò)展和所完成任務(wù)的復(fù)雜程度的提高,在中小批量的生產(chǎn)中,用在線示教編程很難實(shí)現(xiàn)}z7。離線示教即脫離實(shí)際作業(yè)環(huán)境生成示教數(shù)據(jù),間接地對機(jī)器人進(jìn)行示教,對操作人員要求較高,使用也不太方便,尤其是在對機(jī)器人作業(yè)任務(wù)的描述上不能簡單直接。虛擬示教編程充分利用上述兩種示教方法的優(yōu)點(diǎn),借助于虛擬現(xiàn)實(shí)系統(tǒng)中的人機(jī)交互裝置操作計(jì)算機(jī)屏幕上的虛擬機(jī)器人動作,經(jīng)仿真通過后,記錄示教點(diǎn)位姿、動作指令,將生成作業(yè)文件下載到機(jī)器人控制器,完成機(jī)器人的示教。
2弧焊機(jī)器人虛擬示教系統(tǒng)設(shè)計(jì)
該弧焊機(jī)器人示教系統(tǒng)主要分為四大部分,即實(shí)體建模、模型位姿調(diào)整、控制參數(shù)輸人輸出焊接機(jī)器人仿真示教等。
2.1弧焊機(jī)器人實(shí)體建模
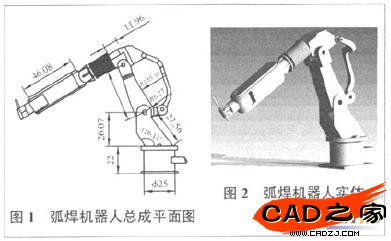
首先根據(jù)實(shí)際幾何參數(shù),利用SolidWorks的實(shí)體造型功能構(gòu)建出弧焊機(jī)器人各零件、待焊工件和工作空間的三維模型,如圖1、圖2所示。
2.2控制部分程序設(shè)計(jì)
2.2.1 Weld控制界面DLL程序設(shè)計(jì)
本文應(yīng)用Visual C++開發(fā)虛擬示教系統(tǒng),使用Visual C++編譯出來的DLL (Dynamic Link Library)作為SolidWorks的插件將程序集成到SolidWorks中。Visual C++的工程向?qū)wizard.swx給出了Solid Works的基本開發(fā)模板,使用前須先將Swizard.swx復(fù)制Visual C++安裝目錄CommonlMSDev98Template文件夾下。
用向?qū)?chuàng)建一個名稱為"Weld"的新DLL,插人對話框資源文件,使用編輯工具條在對話框上添加文本框、編輯框等控件,在對話框上點(diǎn)擊右鍵選擇類向?qū)В瑸閷υ捒騽?chuàng)建一個新的類,然后為對話框的各個控件添加成員變量和成員函數(shù)并進(jìn)行編輯,Weld控制界面如圖3所示(程序代碼從略)。
2.2.2對話框與SolidWorks的鏈接
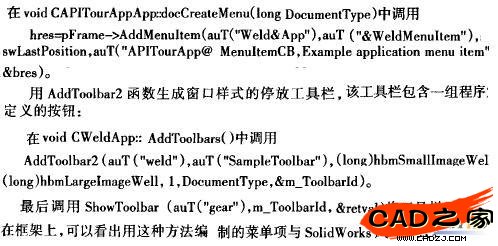
用AddMenultem函數(shù)為當(dāng)前下拉菜單添加菜單項(xiàng)或分割條
機(jī)器人示教編程方式有兩種:在線示教、離線示教。在線示教即手把手示教,簡單方便,適用于大批量生產(chǎn),所完成的任務(wù)簡單單一,但是隨著機(jī)器人適用任務(wù)的擴(kuò)展和所完成任務(wù)的復(fù)雜程度的提高,在中小批量的生產(chǎn)中,用在線示教編程很難實(shí)現(xiàn)}z7。離線示教即脫離實(shí)際作業(yè)環(huán)境生成示教數(shù)據(jù),間接地對機(jī)器人進(jìn)行示教,對操作人員要求較高,使用也不太方便,尤其是在對機(jī)器人作業(yè)任務(wù)的描述上不能簡單直接。虛擬示教編程充分利用上述兩種示教方法的優(yōu)點(diǎn),借助于虛擬現(xiàn)實(shí)系統(tǒng)中的人機(jī)交互裝置操作計(jì)算機(jī)屏幕上的虛擬機(jī)器人動作,經(jīng)仿真通過后,記錄示教點(diǎn)位姿、動作指令,將生成作業(yè)文件下載到機(jī)器人控制器,完成機(jī)器人的示教。
2弧焊機(jī)器人虛擬示教系統(tǒng)設(shè)計(jì)
該弧焊機(jī)器人示教系統(tǒng)主要分為四大部分,即實(shí)體建模、模型位姿調(diào)整、控制參數(shù)輸人輸出焊接機(jī)器人仿真示教等。
2.1弧焊機(jī)器人實(shí)體建模
首先根據(jù)實(shí)際幾何參數(shù),利用SolidWorks的實(shí)體造型功能構(gòu)建出弧焊機(jī)器人各零件、待焊工件和工作空間的三維模型,如圖1、圖2所示。
2.2控制部分程序設(shè)計(jì)
2.2.1 Weld控制界面DLL程序設(shè)計(jì)
本文應(yīng)用Visual C++開發(fā)虛擬示教系統(tǒng),使用Visual C++編譯出來的DLL (Dynamic Link Library)作為SolidWorks的插件將程序集成到SolidWorks中。Visual C++的工程向?qū)wizard.swx給出了Solid Works的基本開發(fā)模板,使用前須先將Swizard.swx復(fù)制Visual C++安裝目錄CommonlMSDev98Template文件夾下。
用向?qū)?chuàng)建一個名稱為"Weld"的新DLL,插人對話框資源文件,使用編輯工具條在對話框上添加文本框、編輯框等控件,在對話框上點(diǎn)擊右鍵選擇類向?qū)В瑸閷υ捒騽?chuàng)建一個新的類,然后為對話框的各個控件添加成員變量和成員函數(shù)并進(jìn)行編輯,Weld控制界面如圖3所示(程序代碼從略)。

2.2.2對話框與SolidWorks的鏈接
用AddMenultem函數(shù)為當(dāng)前下拉菜單添加菜單項(xiàng)或分割條
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF