2.3 FMD夾具設計
力限FMD夾具不同于傳統的振動夾具,傳統的振動夾具一般采用整體式結構,盡量避免螺接或焊接。力傳感器測量的原理決定了其必須成為夾具中承力的主要部件,因此FMD夾具通常為分體式,通過螺釘連接為一個整體,在文獻[5]中將FMD設計為一個測力環,然后其上再安裝夾具。本設計將測力環與夾具進行整合使其具有測力和夾具的雙重功能,該FMD夾具由三部分組成:上夾具、下夾具、力傳感器,見圖3。上夾具用于與衛星連接,下夾具用于與振動臺連接。
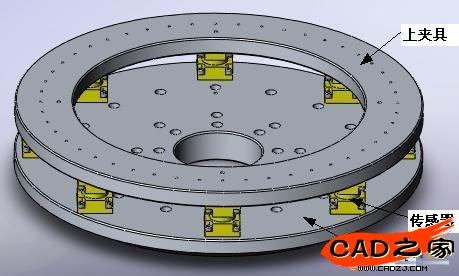
圖3:力限FMD夾具
為了使夾具在保證剛度的前提下重量盡可能輕,選用鑄鋁作為上下夾具的材料,并通過鑄造成形。經計算上下兩段夾具總質量為514.54Kg,傳感器每個質量10.5Kg,共84Kg,整個FMD夾具總質量為598.54Kg,總高度295mm。本夾具由于采用的是組合連接方式,具有很高的靈活性,對于接口不同的衛星產品只需重新投產上夾具即可解決兼容性問題。8個力傳感器的分布有兩種選擇,即正交分布和斜交分布。正交分布為在橫向振動的X和Y軸上具有4個傳感器,見圖4。斜交分布為傳感器與橫向振動的X、Y軸具有22.5度的偏離,見圖5。
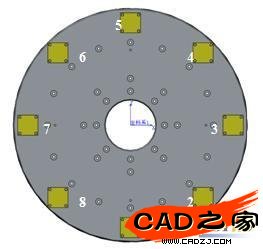
圖4:正交分布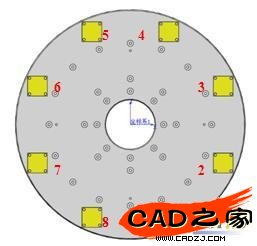
圖5:斜交分布
當做垂直向振動時,8個傳感器在受力方向上處于同一平面,力由每個傳感器均勻承擔,正交與斜交對于傳感器的受力幾乎沒有區別。當做水平向振動時,受力情況較為復雜,除了橫向力外還具有傾覆力,且傳感器在橫向力的方向上不處于同一平面,每個傳感器的受力是完全不同的,正交與斜交兩種分布方式將會對傳感器的受力產生影響。本文第3節中將分析兩種分布的剛度以及對于橫向受力的影響,選出較為合理的一種。
3 計算與分析
3.1 頻率計算
頻率計算采用cosmos軟件進行有限元模態分析,由于下夾具與振動臺連接,故約束下夾具每個安裝孔的3個平動自由度,傳感器分別通過4個螺釘與上下夾具相連,因此將傳感器的上下表面設置為剛性連接。傳感器建模外形按照實際尺寸,并修正其密度和彈性模量,使之質量和各向一階頻率與實際指標一致。經修正密度為7540kg/m3,彈性模量為4.5GPa,計算質量為10.5Kg,計算一階橫向頻率為1927Hz,一階垂直向頻率為2030Hz。可見在這組參數的修正下,橫向剛度基本與指標一致,由于內部結構未知,只能將其模擬為剛體,因此在彈性模量一致的情況下出現了垂直向剛度和橫向剛度相差不大的情況,修正后的傳感器模型滿足了橫向剛度,雖然垂直向剛度遠小于指標值,但可以說此模型是保守的,如果將其代入整體結構進行計算,其頻率也將是保守的。經計算正交分布和斜交分布的一階頻率見表2,振型見圖6、7、8、9。

表2:正交與斜交分布一階頻率

圖6:正交分布橫向一階振型

圖7:斜交分布橫向一階振型
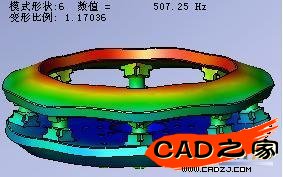
圖8:正交分布垂直向一階振型
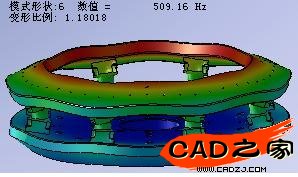
圖9:斜交分布垂直向一階振型
從表2可知無論是正交還是斜交分布,其橫向一階頻率都幾乎達到了試驗最高頻率的3倍,而垂直向頻率由于使用了傳感器的保守剛度,其實際頻率應比表格中的數值更高,因此從頻率角度來說正交和斜交都可滿足試驗的要求。