2.2基于COSMOSWorks的支桿有限元分析
動平臺的運動范圍是由超磁致伸縮作動器的伸縮量決定,從而獲得納米級的高精度運動.為了使動平臺具有較好的動態特性和較高的固有頻率,利用有限元分析軟件COSMOSWorks對支桿模型進行頻率分析.COSMOSXpress僅支持對固態單實體零件的分析,不支持對裝配體、表面模型或多實體零件的分析.COSMOSWorks使用SRAC公司開發的當今世上最快的有限元分析算法--快速有限元算法(FFE),能夠提供分析廣泛的分析工具去檢驗和分析復雜零件和裝配體,包含COSMOSXpress在內的更多高級分析功能.
支桿由超磁致伸縮材料做成的作動器及兩端的柔性球鉸構成,用SolidWorks建立三維模型,如圖5所示,整個支桿模型用空間梁單元來模擬.

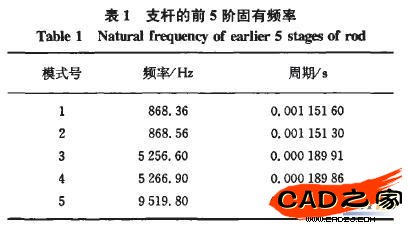
建立了有限元分析模型后,通過COS:MOSWorks分析支桿的固有頻率和振型,頻率數設置為5.前5階固有頻率見表一。
3 整體剛度分析和安全校核
3.1整體設計與裝配
并聯微動機構的運動副是材料為尼龍,尺寸為t=1mm,r=3 mm的柔性球鉸;磁致伸縮驅動器的最大行程為45ηm,最大輸出力為1 800 N,取每支桿上下端鉸鏈中心桿長L為85mm;取上平臺直徑為120 mm,厚度為5 mm,下平臺直徑為200 mm.運用SolidWorks建立三維模型后進行裝配.
并聯微動機構主要由上下平臺、彈性支桿、柔性鉸鏈組成.將下平臺作為整個機構的固定參考件,插入柔性鉸鏈、彈性支桿及上平臺時,均將其定義為相對于固定參考件的活動零件.除"同軸"、"重合"、"相切"等基本操作外,還利用SolidWorks中的"干涉檢查"這一工具對6根支桿進行干涉檢查.
3.2 基于SolidWorks的整體有限元分析
并聯微動機構希望其工作空間滿足以下要求:X軸最大行程≥士0.04 mm;Y軸最大行程≥±0.04 mm;Z軸最大行程≥±0.015 mm機構在受到桿件驅動,鉸鏈傳動后產生相應的變化,要確定這些變化對工作可靠性產生的影響,必須設定一個安全系數來界定.考慮零件的材料、工作的實際情況等因素,要求安全系數大于2.
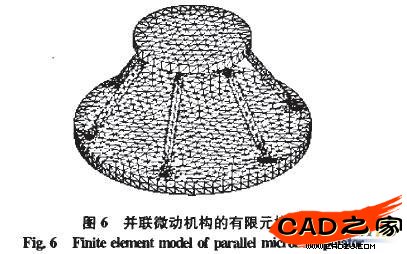
采用COSMOSworks進行整體剛度分析和安全校核.有限元分析程序將整個模型視為一個網狀物,這個網是由離散的相互連接在一起的單元構成的.精確的有限元結果很大程度上依賴于網格的質量.對于需要精確計算的局部位置,采用加密網格可以得到比較好的結果.柔性鉸鏈的最小厚度處容易發生應力集中及疲勞折斷,在網格劃分時對此處進行細分,整體有限元模型如圖6所示.
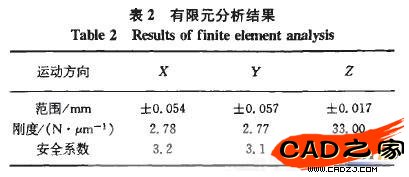
COSMOSworks除了以圖解的形式表達有限元結果,還可以將結果以數值的形式表示.動平臺的運動結果如表2所示,同時還可計算出對應的剛度和安全系數.
由分析結果可知,X軸最大運動范圍為±0.054 mm;Y軸最大運動范圍為±0.057 mm;Z軸最大運動范圍為±0.017mm,均達到設計指標.并聯微動機構的法向剛度遠大于切向剛度,法向安全系數足夠大,雖然切向安全系數接近安全下限,整體工作在安全系數規定的范圍內.
4 結論
在并聯微動機構的設計中,采用柔性鉸鏈來實現無摩擦無間隙的傳動,以6個支撐桿件的移動副作為輸入,采用磁致伸縮作動器作為支撐桿,同時作為驅動元件.借助SolidWorks虛擬三維設計及裝配技術,能提高設計效率,縮短設計周期.運用其內嵌的COSMOSXpress和COSMOSWorks有限元分析處理模塊對零部件和裝配體進行分析,得到各種有用的參數,指導設計改進.
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF